本研究室の学生らが日本機械学会 ロボティクス・メカトロニクス講演会にてポスター発表を行いました.
本大会は昨年に引き続き現地で開催され,活発な議論を交えることができました.
皆様から頂いたご意見や知見をもとに,今後の研究活動に活かしていきたい所存です.
発表内容
- 五十嵐 洋 教授
模倣と多様性維持による社会的適応アルゴリズム
-スクランブル交差点シミュレーションにおける適応性評価- - 佐々木 元気さん(D3)
ヒト同士の協調作業における動的解析手法の提案
– 「気づかい」によるパフォーマンス変化の要因の解析- - 小林 航大さん(D3)
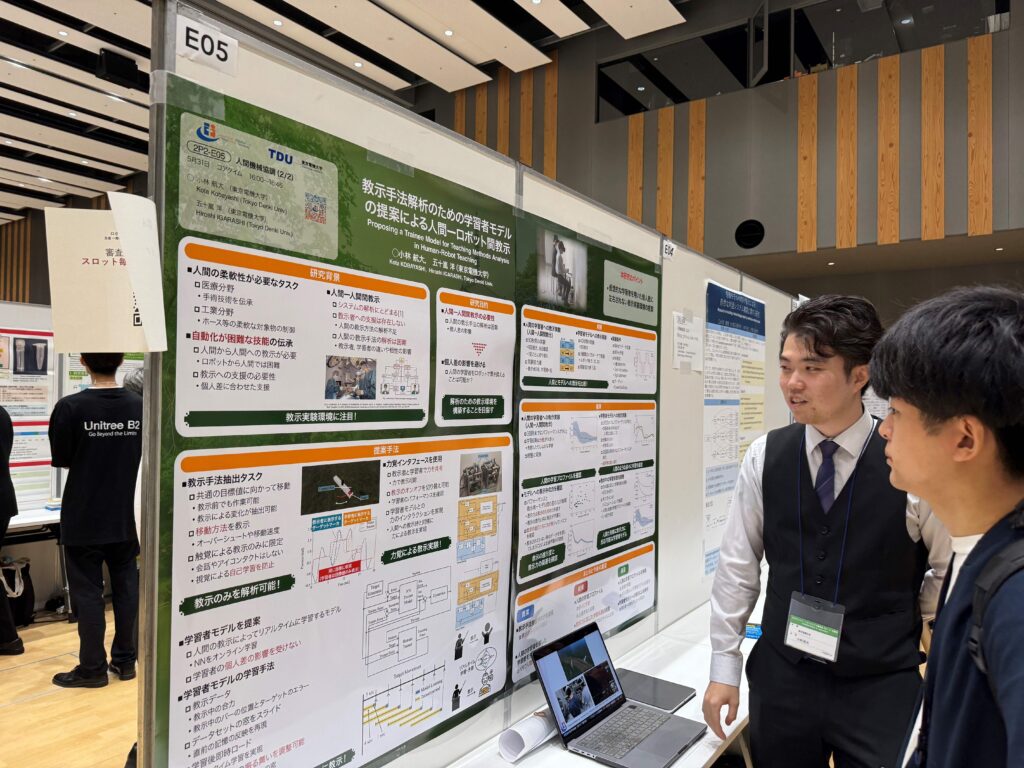
教示手法解析のための学習者モデルの提案による人間―ロボット間教示 - 戸塚 圭亮さん(D3)
テクスチャモデル簡略化に向けた重回帰モデル適応の検討 - Bastien Poitrimolさん(D3)
A novel approach to multimodal haptic feedback integration using a planar cable-driven parallel robot - 小野川 樹さん(M2)
VRユーザーの視線データを利用した非注意性盲目の予測モデル構築 - 土谷 脩人さん(M2)
単一接触点に複合的な触覚フィードバックが可能な装置の開発 - 中村 美月さん(M2)
VR空間のサブリミナルな空気抵抗変化による投球コントロール熟達支援
-人間の予測に近づける空気抵抗の大きさがサブリミナルに変化する環境での実験- - 山田 侑果さん(M2)
座位姿勢の解析および矯正に向けたワイヤアレイセンサの開発 - Louis-Andre Nicolasさん (M2)
Improvement of Multi-Agent Approximation Model of Slime Mold for Transportation Network Design
- 大塚 凱さん(M1)
入眠導入に適した振動周波数・振幅の知覚範囲の調査 - 北岩 隼人さん(M1)
握り動作における痛みの緩和バイアスの調査 - 劉 樹鵬さん(M1)
聴覚刺激による無意識下でのリズム誘導におけるストレス推定 - 梁瀬 琉真さん(M1)
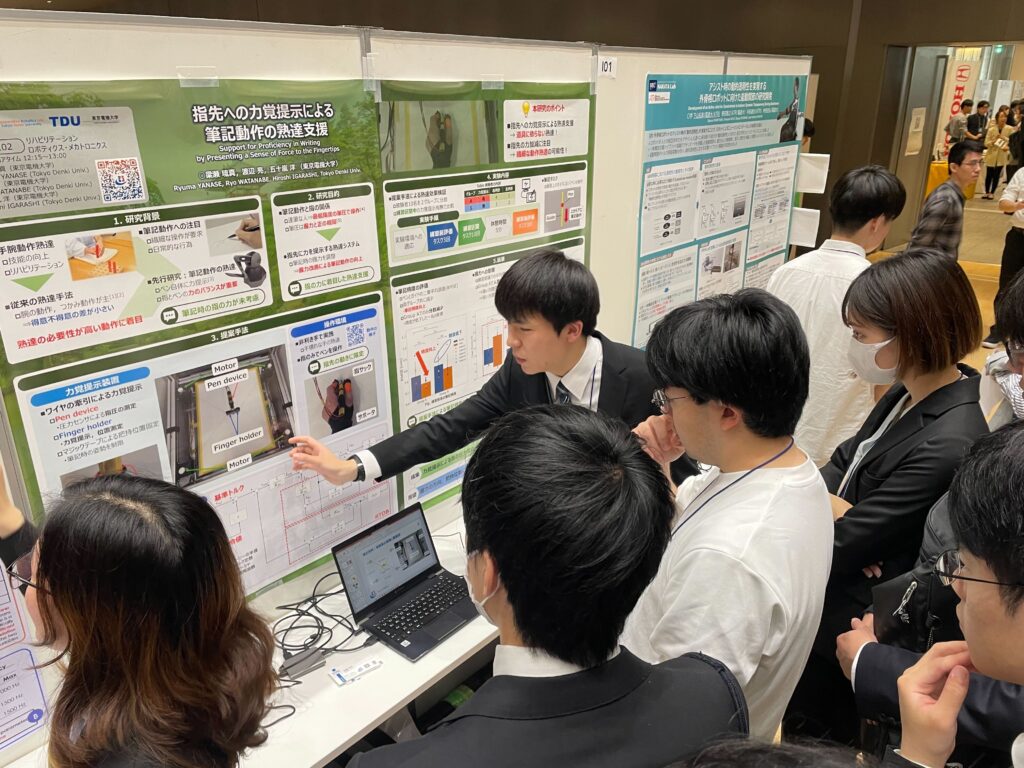
指先への力覚提示による筆記動作の熟達支援