今日,複数ロボットを用いた協調作業では,事前に環境適応させた動作戦略設計がされています.しかし,こうしたロボットでは予期せぬ外乱に対して機能することが出来ない問題点がありました.
そこで本研究では,人間の社会性認知にみられる個性模倣と多様性維持を規範とした環境適応アルゴリズムの提案をおこないます.
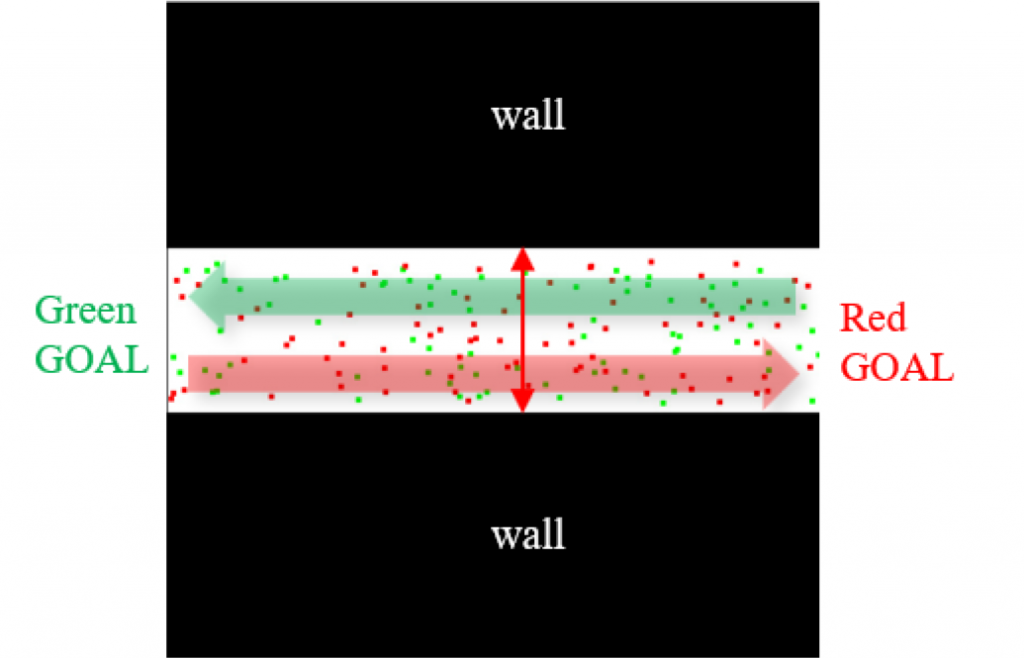
現在は,模倣の程度を変化させる重みによって多様性維持を導入し,対面通行シミュレーションを構築して有効性を検討しています.
今日,複数ロボットを用いた協調作業では,事前に環境適応させた動作戦略設計がされています.しかし,こうしたロボットでは予期せぬ外乱に対して機能することが出来ない問題点がありました.
そこで本研究では,人間の社会性認知にみられる個性模倣と多様性維持を規範とした環境適応アルゴリズムの提案をおこないます.
現在は,模倣の程度を変化させる重みによって多様性維持を導入し,対面通行シミュレーションを構築して有効性を検討しています.