This research aims to propose a multi-agent model to design transportation systems that minimize the total cost in regards with transportation modes and environment topography.
Abstract
Transportation systems are one of the main causes of carbon emissions and take a great part in energy consumption in terms of infrastructure, transports use and maintenance.
Their design is a complex task that requires to adopt a systemic approach to minimize their energy cost. Transport modes are not always used at their optimal speed and passenger capacity. Then, the deployment of transport modes can be reconsidered in terms of energetic efficiency. Classification of transport modes regarding their energy consumption can be made from their characteristics like optimal speed, maximal traffic rate per km or transport capacity, but environmental conditions play a high role in infrastructure design.
Overview of the research
Transportation network involves balancing various environmental (height variation, soil quality, obstacles, rivers/lake, …) and economical (maintenance, infrastructure, transports production) factors. The emergency of desire paths created as a consequence of mechanical erosion highlights misconception in relevancy and energy-efficiency of transportation systems.

The reproduction of the emergent pathways systems and human behaviors can help civil engineers and urban planning designers to plan better transportation systems. The used multi-agent model consists of deploying a large number of agents that interact with and according to the environment to lead to a global optimized network. Pedestrian movement [1] and slime mold approximation model [2] presented first tools for solving transportation network problems. However, the relevance of infrastructure use and transport modes in terms of energy consumption are not taken into account.
An energetic approach allows to classify transport modes in terms of passenger capacity and mass transportation [4], but also according to traffic rate, lifespan of transport modes, energetic cost of transports deployment and infrastructure and maintenance.
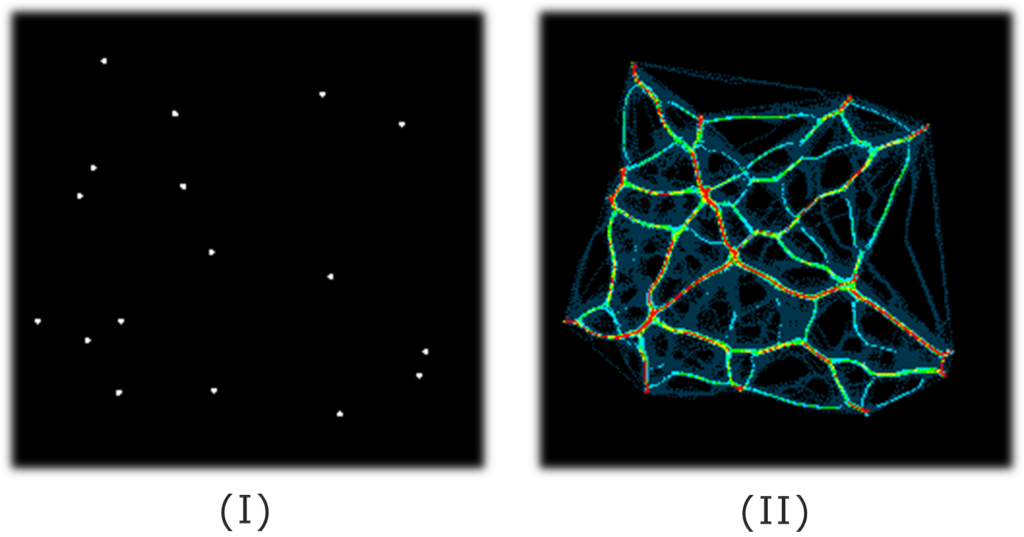
To evaluate this model, an image processing is applied to the resulting network and the transport modes of agent are tracked during the simulation.
References
[1] The universal visitation law of human mobility, Markus Schläpfer, Lei Dong, Kevin O’Keeffe, Paolo Santi, Michael Szell, Hadrien Salat, Samuel Anklesaria1, Mohammad Vazifeh, Carlo Ratti & Geoffrey B. West, 2021
[2] Simple agents complex emergent path systems agent based modeling of pedestrian movement, Ma, L., Brandt, S A., Seipel, S., Ma, D., 2023
[3] Physarum machines imitating a Roman road network the 3D approach, Vasilis Evangelidis, Jeff Jones, Nikolaos Dourvas, Michail-Antisthenis Tsompanas, Georgios Ch. Sirakoulis and Andrew Adamatzky, 2017
[4] Jeff Jones, “A Morphological Adaptation Approach to Path Planning Inspired by Slime Mould” , Centre for Unconventional Computing, University of the West of England, Coldharbour Lane, Brisol, BS16 1QY, UK, 2015.
[5] Galin et al., Procedural Generation of Roads, 2010
[6] Hijzelendoorn, Creating Varied Terrain-Considerate Road Networks on Heightmaps with Directed Alternating Physarum Agents, Utrecht University, 2023
Author
Louis-Andre Nicolas, 2nd year of master thesis
He entered SUPMICROTECH – ENSMM in 2019, then joined Tokyo Denki University through a double degree program in 2023.
Research Area: Cooperative Robotics, Multi-Agent Systems