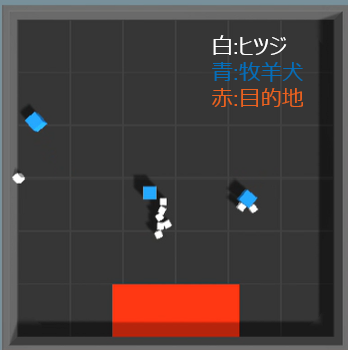
近年,急速な通信技術の発達に伴ってロボット間での高速な通信が可能となってきており,複数台のロボットによる協調作業の研究が盛んに行われている.複数台のロボットを用いたマルチエージェントの対象問題として牧羊犬問題が挙げられるが,従来はこの問題に対して人間が必要な動作を細かく制御する手法がとられてきた. しかし, 人間が制御規則を定める方法ではタスクの環境の変化に対応することが困難である.
本研究では,設計者の介在がより少ない人工知能アプローチによって牧羊犬問題をとく.その際,自律的に働くロボットの制御手法として強化学習を用いるが,この手法は膨大な学習時間を要するという欠点がある.そこで模倣学習を活用した遠隔操作ロボットを取り入れる事によって,より効率的に羊の誘導を実現することを目的とする.
結果として,強化学習のみの場合と比べた際に行動が不安定であり,誘導に最適であると言えるような行動は確認できなかった.しかし,タスクを達成し始めるまでの時間は大幅に減少させることができた.したがって最適な誘導という点を除き,タスクを達成するという事に焦点を当てた際には遠隔操作ロボットを導入する有効性を示すことができた.