-
 人間センシング
人間センシング
仮眠中の体温変化が及ぼすその後の作業効率の変化
研究概要 近年,日本人の睡眠不足は深刻な問題となっている.睡眠不足の主な原因としては,労働環境の変化やスマートフォンの長時間利用などがある.睡眠不足は身体に影響を及ぼし,作業効率低下に繋がってしまう.この睡眠不足の解決 […]-
 crlweb
crlweb
-
-
 人間センシング
人間センシング
握力を利用したステアリングアシスト機構
概要 現在,多種多様のドライビングアシスト機構が考案され実用化されている.これらは人間の動きを用いて予測するシステムは少なく,車両や周辺状況を触覚や視覚や聴覚を用いてドライバーへ認知・アシストするものが多い.本来は直接ド […]-
crlweb
-
-
 人間センシング
人間センシング
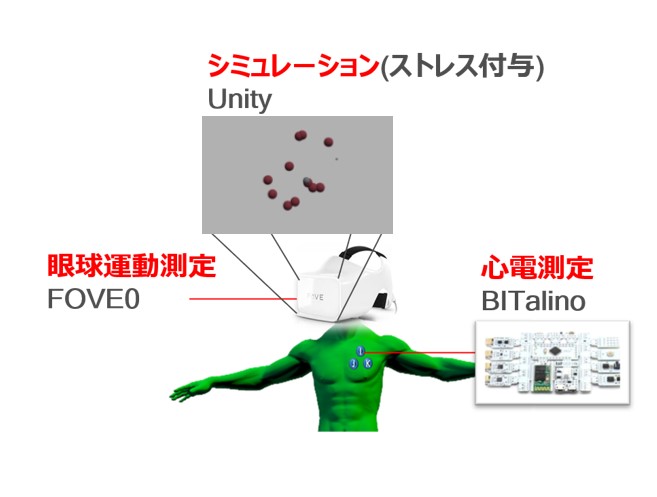
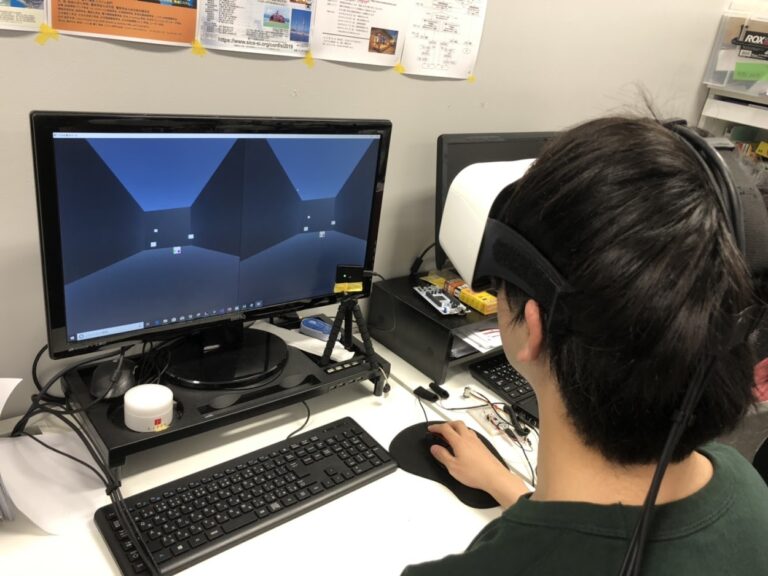
眼球運動測定によるリアルタイムストレス評価
近年,Virtual Reality(VR)がより発展しています. 実際に教育分野などでは体験による知識の定着を目的として,VRを用いた授業などが取り入れられ始めています. VRを利用する授業は視覚から入る情報量を増加さ […]-
crlweb
-
-
 人間センシング
人間センシング
視線情報を用いた運転行動の推定
概要 近年,特に自動車産業においては完全自動運転実現に向けた開発が急速に進められており,その中で人間が運転に介入すべき場面は減少していくとみられる.しかし,その実現には多くの課題があるため人の運転行動を解明することは重 […]-
crlweb
-
-
 人間機械システム
人間機械システム
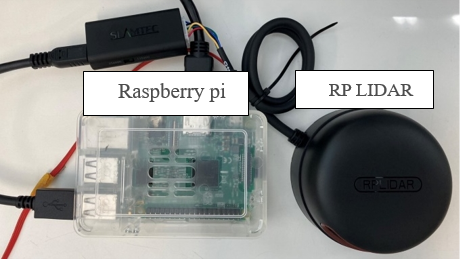
ウェアラブルデバイスSLAM
概要 災害現場では早期の災害規模の把握と二次災害の防止を目的として,情報収集を効率的かつ安全に行う必要がある.災害現場において二次災害を伴わないレスキューロボットやウェアラブルデバイスによる情報収集の研究が行われている […]-
crlweb
-
-
 人間センシング
人間センシング
両手同時操作における自己回帰型操作支援
多様な道具を有した機械操作を実現させるためには、多くの自由度を持つ操作が必要となります。そこで、両手を用いた自由度の高い操作が注目されています。両手操作の課題の一つに、クロストークが挙げられます。クロストークとは、片手へ […]-
crlweb
-
-
 人間センシング
人間センシング
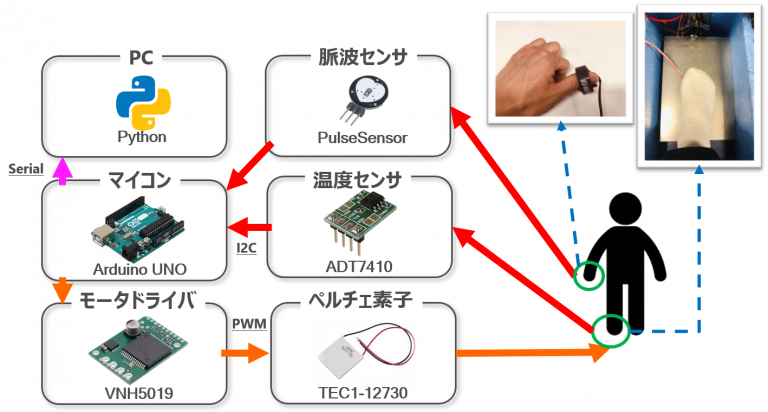
生体信号と体温の相関性を用いた ストレス軽減デバイスの開発
近年,日本はストレス社会と言われており,人々は職場や家庭などの環境において様々なストレスを受けています.さらに,ストレスの蓄積は精神だけでなく身体にも悪影響を及ぼし多くの疾患を間接的に引き起こす原因にもなると言われてい […]-
crlweb
-
-
 人間センシング
人間センシング
協調性向上のためのAttention Gridによる注意推定
近年,人型ロボットの研究が盛んに行われ,社会で普及しています. しかし今現在の技術では,相手の注意から行動を予測し,空気を読んだり他者への気づかいを行う, 即ち協調性に優れているロボットの開発は難しく,真の意味で人間と対 […]-
crlweb
-
-
人間機械システム
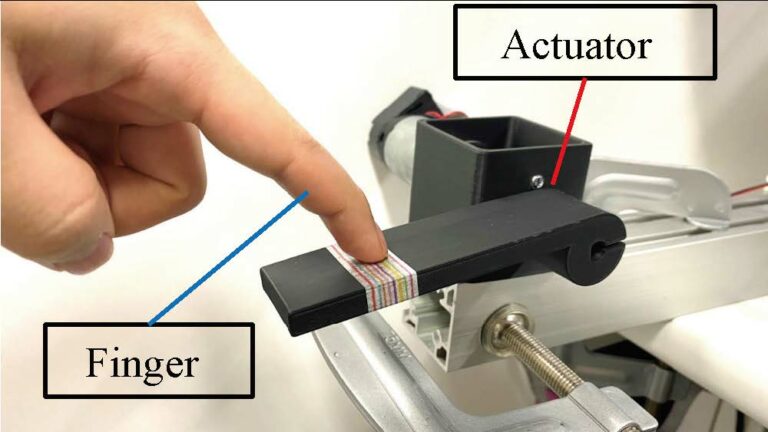
ピアノ初心者のための早期楽器演奏熟達支援システム
鍵盤楽器演奏において,音色表現の要素には打鍵箇所,リズム,打鍵速度,離鍵があります.打鍵速度は音の大きさに影響しており,メリハリのある音色表現を再現できます.メリハリのある音色表現を習得することは楽器演奏の早期熟達に繋が […]-
crlweb
-
-
 人間センシング
人間センシング
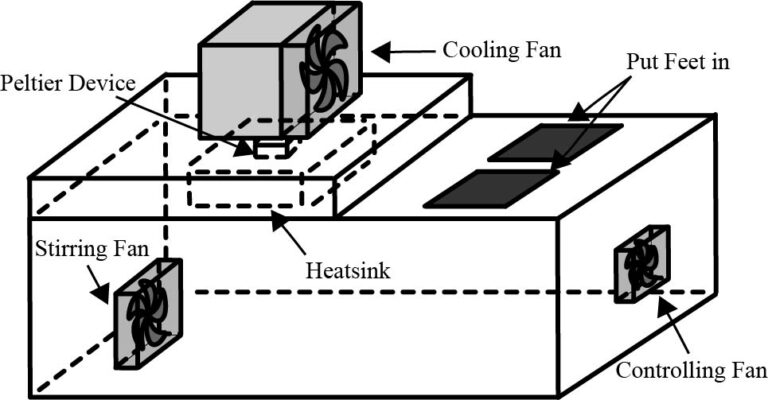
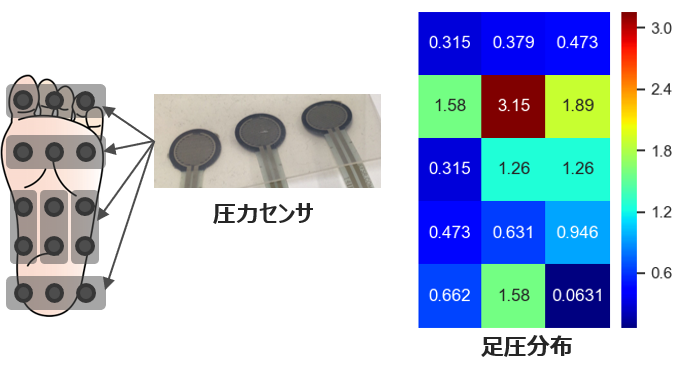
靴型デバイスの形状変化による圧力分散
この研究では、足裏にかかる圧力の偏りを分散させる歩行サポートを目指しています。 私たちは歩くとき、扁平足のような慢性疾患や足と靴のサイズの不一致により足圧が偏っています。 これまでの歩行サポートには、歩行状態(足圧分布, […]-
crlweb
-