遠隔操作を行う場合、現代の技術では通信の影響で遅延が発生してしまう。このような常行を改善するために操作に対するアシストを行う手法が存在する。しかし、現在のアシストでは操作の安定化が主であり、操作を行う自身の予期しない動作を行うことが多々存在する。私の実験では操作感・自己主体感の向上もしくは保持を重視した遅延環境用アシストの作製及び評価を目的とする。
実験内容
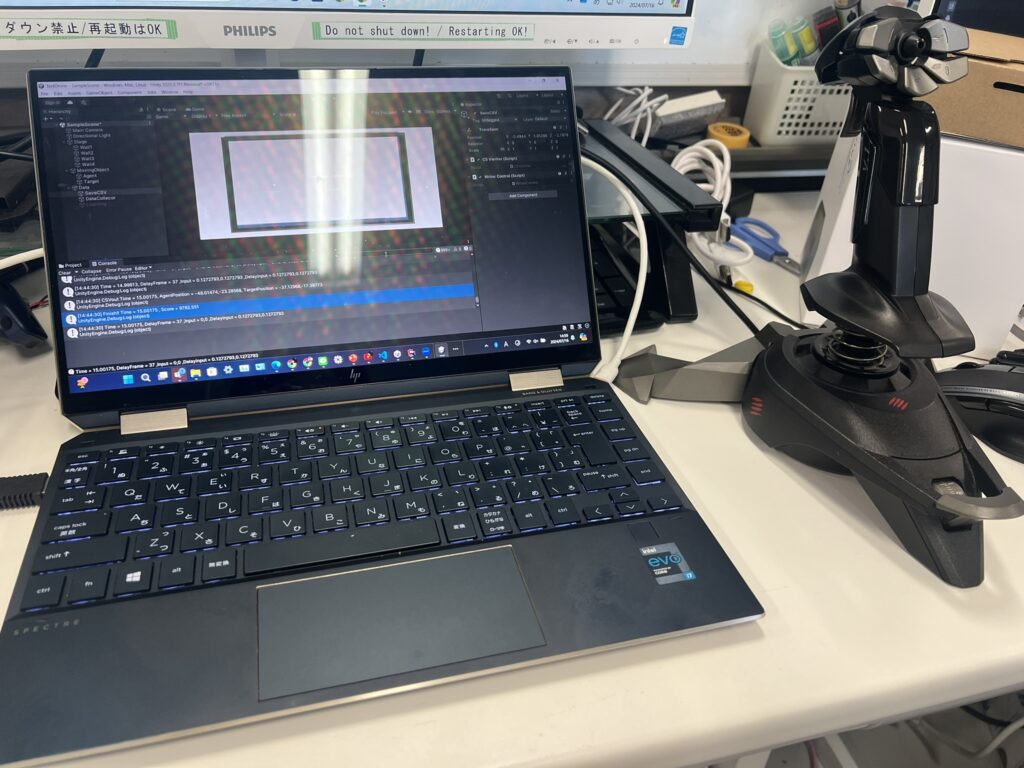
調整された乱数でランダムに動作するターゲットを各種の遅延を内蔵したエージェントで追従するタスクである。エージェントは現在遅延なし・固定遅延・変動遅延の3種類の動作環境を用意している。フレーム単位で調節が可能であり、現在は暫定で固定30フレーム、変動遅延は10~50フレーム(0.3秒切り替え)を用意している。また、変動する環境を再現するために切り替え時間に乱数を導入予定である。システムは自身のノートパソコン(HP Spectre)、Unity2021、Windows11、スティックを用いている。
今後に機械学習を用いた先読み予測アルゴリズムを作成し、アシストを作成する予定である。システムはUnity ML-AgentsかUnity + Pythonを用いる予定である。入力値とターゲット、エージェントの位置から機械学習を用いて先読みの結果を算出し、現在地と入力値の違いから入力値の値を調節し、アシストを行う予定である。しかし、これでは従来のアシストと差がないため、操作感・自己主体感を優先した手法の考案が必要である。