集積回路技術や人工知能技術の発展により,人間が機械システムと共に作業する機会が近年増加している.産業界では従来,人間と産業用ロボットとの作業における危険性を考慮した結果,産業用ロボットの周りに安全柵を設置していた.そのため,ロボットの作業結果を逐次に確認および修正することが困難であった.しかし,協働ロボットの小型化や厚生労働省による安全規格の改正により,協働作業における安全柵は不要となった.その結果,人間と協働ロボット間において,リアルタイムでのインタラクションが可能となった.産業界のみならず,乗用車といった身近な工業製品を使う場面においても,運転を支援するシステムが構築されている.自動運転レベル5への開発は発展途上であるが,高速道路におけるハンズオフ運転といった人間が機械システムに操作を任せることが可能となった.以上より,機械システムによって人為的過誤を減少させることが期待されている.
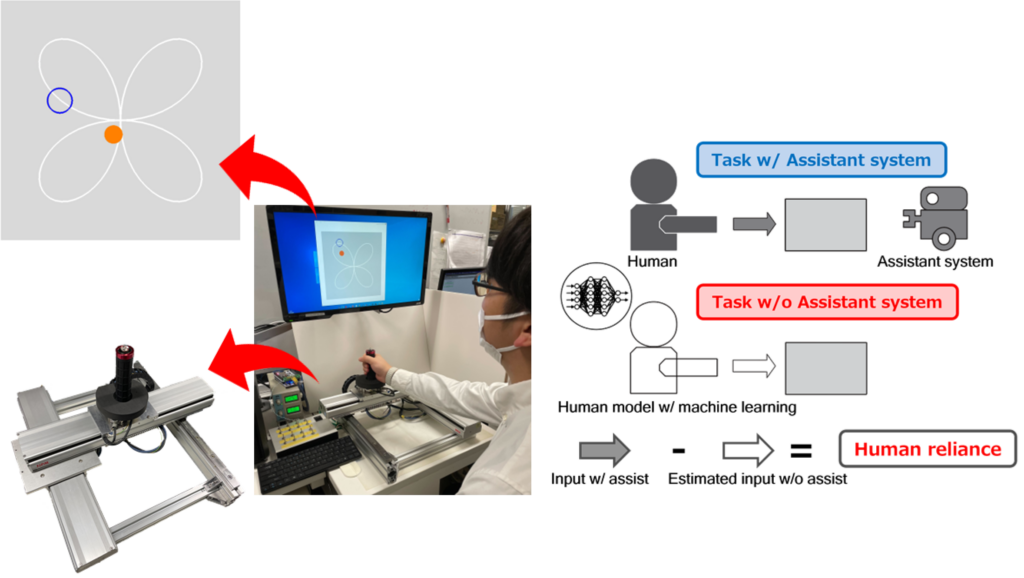
人間が機械システムに任せる機会が増加していく上で,機械システムの操作も完全でないことが問題として挙げられている.機械システムは目標設定に基づく制御は容易であるが,フレーム問題と呼ばれる未知の環境に対して対応することが困難である.よって,機械システムの不十分な部分を補うために人間の存在が不可欠なのである.人間が機械システムを多用に使うことは,機械システムを過信していることが原因であると考えられてきた.そこで本研究では,以下の図に示すようなアシストシステムとの協働作業を模した実験環境を作成した.また,ニューラルネットワークによる個人差操作モデル生成手法を用いて依存度の定量化を行った.