概要
災害現場では早期の災害規模の把握と二次災害の防止を目的として,情報収集を効率的かつ安全に行う必要がある.災害現場において二次災害を伴わないレスキューロボットやウェアラブルデバイスによる情報収集の研究が行われている.ウェアラブルデバイスの先行研究として,ガス事故防止の無線付きスマートジャケットや体温や,位置情報の取得が可能なスマート消防服などがある.これらは使用者の安全性に特化したデバイスとなっている.また周囲の状況を把握する先行研究としてSLAMと呼ばれるアルゴリズムを用いて自律的に運用できる細索状ロボットや炭鉱救助ロボットなどがある.SLAMとは,自己位置推定と地図構築が可能なアルゴリズムである.SLAMを実行するためにはレーザセンサであるLiDAR を使用するLaser SLAM,カメラを使用したVSLAMなどがある.またそれぞれのセンサは完璧でないため,複数のセンサ情報を,確率的に組み合わせ自己位置推定を行う.手法として拡張カルマンフィルタ,パーティクルフィルタなどがある.LiDAR では距離情報を取得することができるが,災害現場において,被災者の捜索や目視できない危険を感知するには他のセンサが必要であると考えられる.
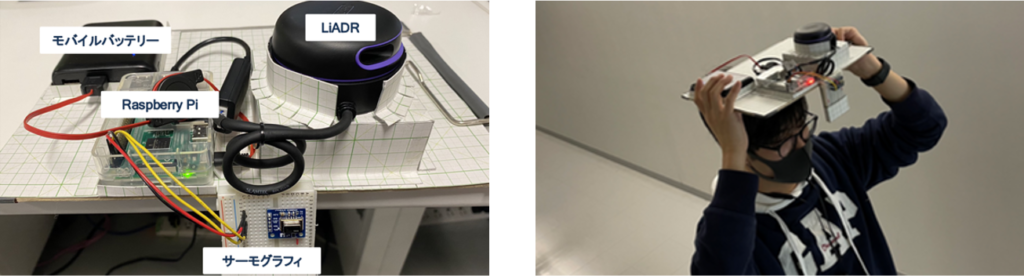
本研究ではSLAMをウェアラブルデバイスとして使用すること,その際にSLAMが構築する地図上にサーモグラフィの測定情報を追加することを目的とする.SLAMが構築する地図上に他のセンサの測定情報を追加することで,ウェアラブルデバイスの使用者の視認できない危険に対しての予測が行えることで,安全性が向上すると考えた.追加するセンサの例として,サーモグラフィ,ガイガーカウンタ,ガスセンサなどが挙げられる.本研究では効率的な災害現の把握を目標としてサーモグラフィを扱う.これによって火災における危険の予測や,瓦礫に埋もれる人の捜索などを行えるのではないかと考えた.期待される研究成果は効率的な災害現場の把握を目標とする.
提案手法
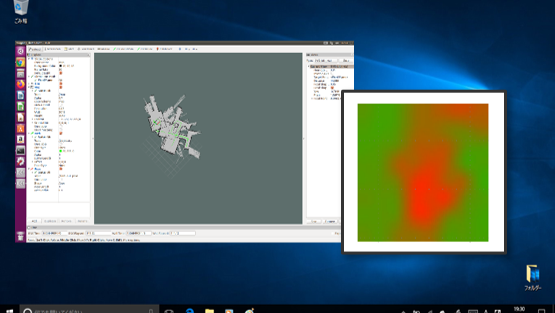
本研究ではホストPCにて,2ウィンドウでの表示を行う一つ目のウィンドウでは地図の可視化を行う.二つ目のウィンドウではサーモグラフィの可視化を行う.リアルタイムで2ウィンドウで表示することでセンサフュージョンを行う.地図の可視化では使用者の前方方向を赤色の棒で表示する.また使用者が通った軌跡を緑色の線で表示を行う.サーモグラフィは使用者の前方方向の温度を表示する.
実験
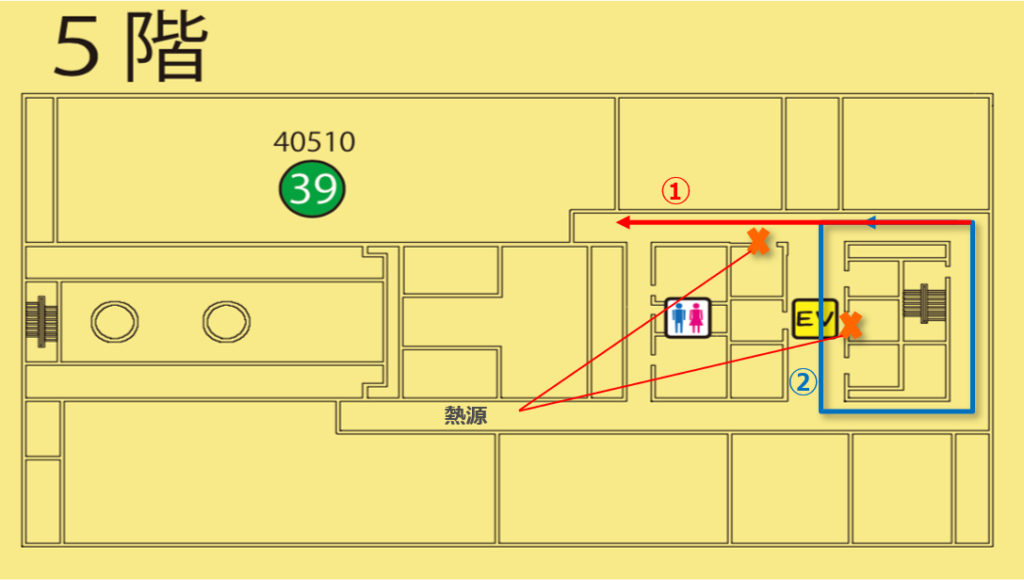
直線経路のRoute1と一周して元の場所に戻ってくるロの字経路のRoute2の2つのルートの測定を行った.Route1もRoute2もスタート地点は同じものとした.サーモグラフィを評価する方法として,熱源を壁に設置し温度の差を確認した.
結果
動画にあるようにSLAMを使った自己位置推定と地図構築を行うウィンドウとサーモグラフィの温度表示を行うウィンドウを同時に表示を行った.SLAMのウィンドウを確認すると直線経路の形はきれいに測定できていることがわかる.次にサーモグラフィのウィンドウを確認すると壁との温度の差が測定できていることが確認できた.
今後の展望
今後の展望としてジャイロセンサ追加による地図の構築と自己位置推定の精度向上,2ウィンドウではなく地図そのものに温度情報を追加することで,地図全体の温度状況が把握を行えるのではないかと考える.また現在は2次元での自己位置推定と地図の構築を行っているが,3次元化により,災害現場や日常生活で安全の補助が行えるではないかと考えられる.具体的な例として暗闇における歩行の補助や,ガスセンサやガイガーカウンタで得た測定情報を可視化することによる危険の予測と回避などが挙げられる.