Information
協調ロボティクス研究室に興味を持っていただきありがとうございます.
このページでは,スケジュールと各研究の概要,YouTubeやZoom等のリンクが掲載されています.
はじめに,教員による研究室説明がZoomによって行われます.
その後の口頭発表はスケジュールに沿って開催され,各パートの開始時刻に同時スタートします.
発表時間外でも,YouTube上で研究紹介を閲覧することが可能です.
Schedule
学生中間発表
研究室紹介
協調ロボティクス研究室の紹介
Hiroshi Igarashi
五十嵐から研究室についての紹介を行います.
相談会
13:30~15:00
皆さんのお悩みに研究室の学生が答えます.
学部4年
ウェアラブルデバイス型SLAM
Yuki Okakuji
Keyword: Human-Machine, Location Estimation, Map Construction
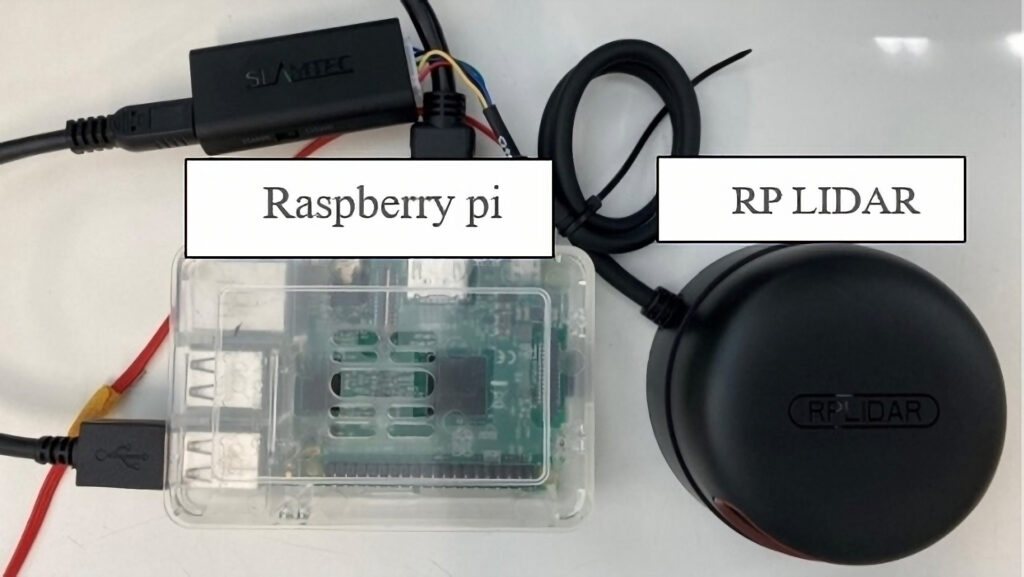
災害現場において, 早期の災害の把握や二次災害防止を目的として,周囲環境の情報収集を効率的かつ安全に行う必要がある. LiDARを用いたSLAM (Simultaneous Localization And Mapping) は自己位置推定と地図構築の機能を備えており, 主に未知環境の把握などに使用される. しかし被災者の捜索や目視できない危険要素を感知するには他のセンサが必要である.
本研究ではSLAMの地図上に他のセンサの測定情報を追加することを目的とする. それにより危険の予測しつつ,効率的かつ安全な災害現場の状況把握が可能となると考えられる. その後,ウェアラブル化することでロボットへの搭載,可視化及び実用性の向上を目指す.
眼球運動測定によるリアルタイムストレス評価
Yuki Oda
Keyword: Human-Sensing, Stress Detection, Ocular Movement
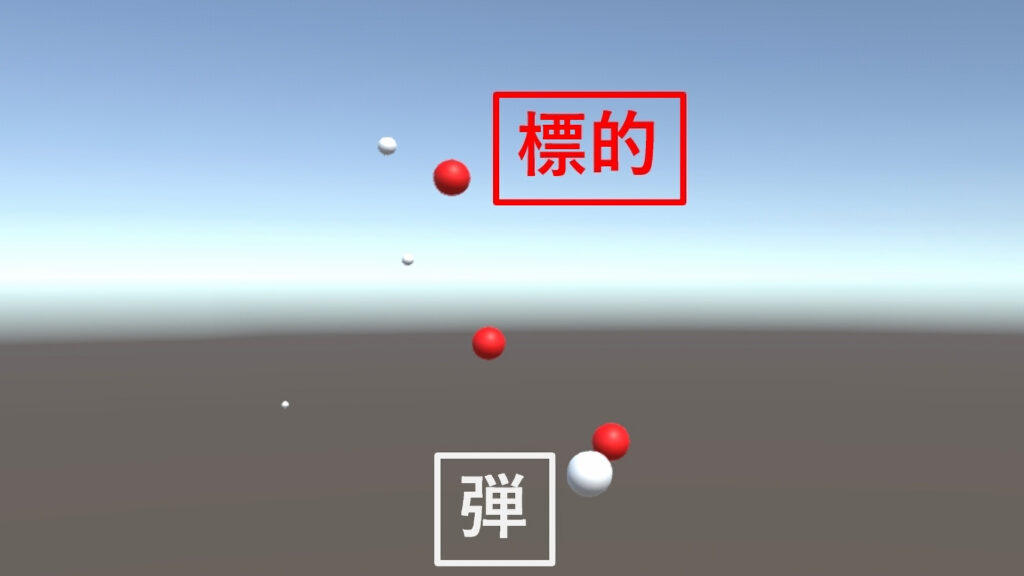
昨今,VR (Virtual Reality) 機器の発展が著しく,教育現場等においてもVRを用いたサービスが提案されている.しかし,VRは現実と異なる操作性や視覚的負荷によるストレスが生じ,学習の妨げになるといわれている.また,現状のストレス測定には一定量の生体信号が必要である.
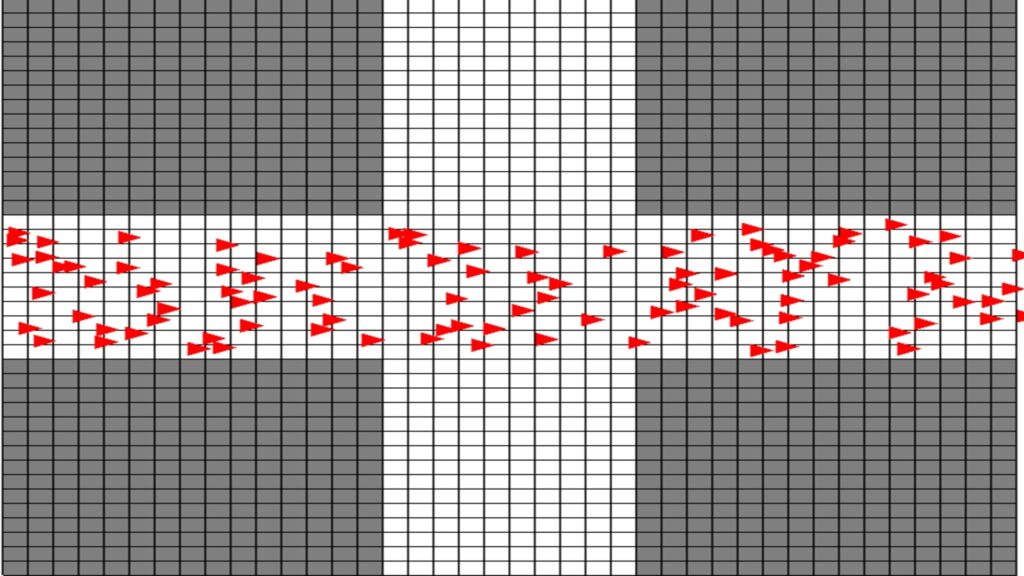
本研究ではストレスの影響による反射作用が発生する,眼球運動に着目したリアルタイムストレス評価を目的とする.提案手法として,VR環境下で人間にストレスを与えるタスクを行う.その時の眼球運動と生体信号によるストレスの定量評価から相関性の検出を目指す.実験では標的の数を増加させることで視覚によるストレスを付与するタスクを用いる.今後の展望として,眼球運動のみでのストレス評価の実用化を図る.
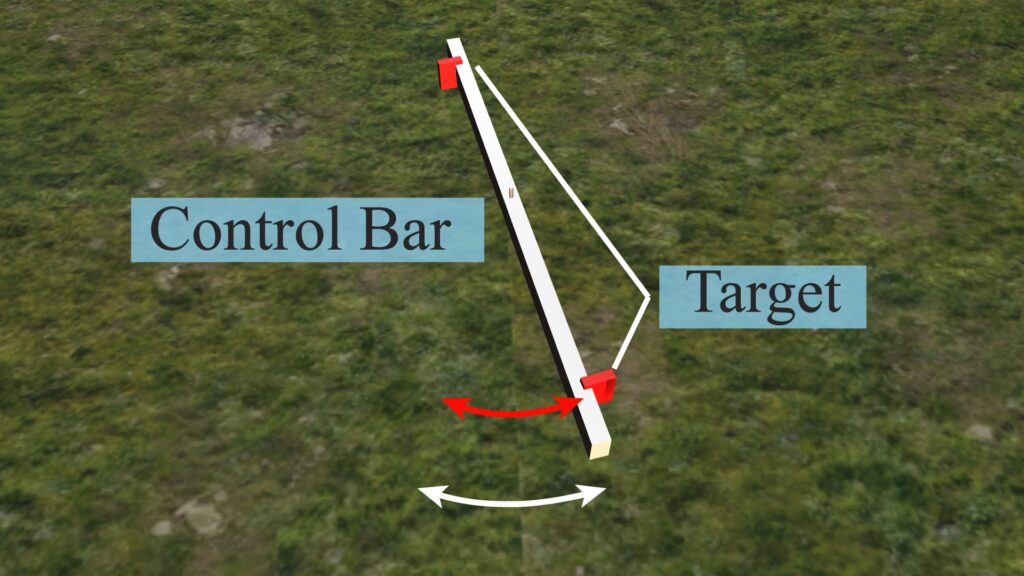
自動化した機械操作に対する人間の信頼推定
Hikaru Nishimura
Keyword: Human-Sensing, Trust-related Behaviour, Trust in Automation
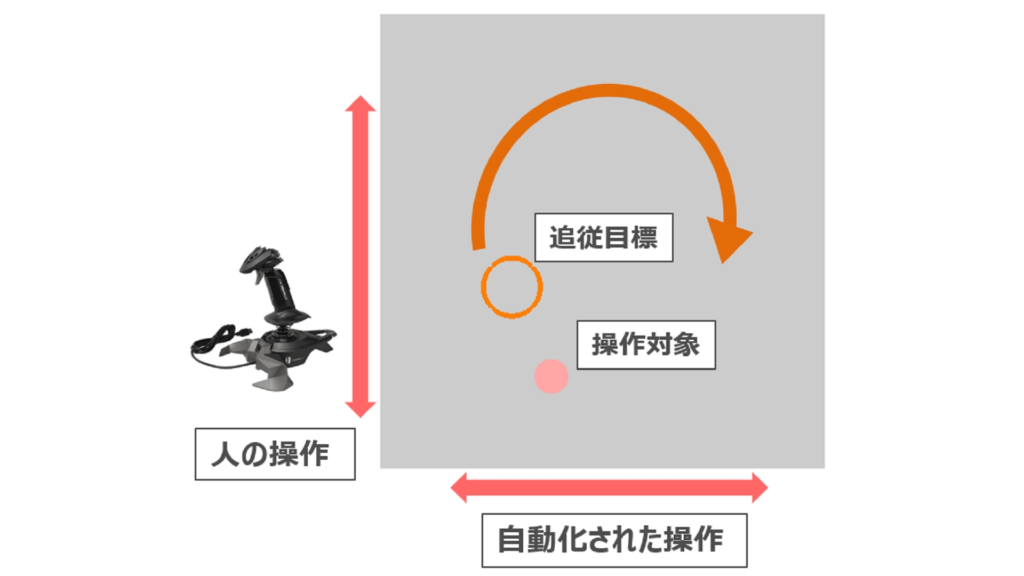
労働による負担の軽減や危険地帯における代替作業のためにシステムの自動化が進められている.しかし,実用化される自動化技術が複雑になるにつれて,人的要因による事故が発生してしまう.人は自動化システムの監視や異常時における対応に必要不可欠であるが,ヒューマンエラーの原因の一つとして自動化に対する信頼が起因していると考えられている.
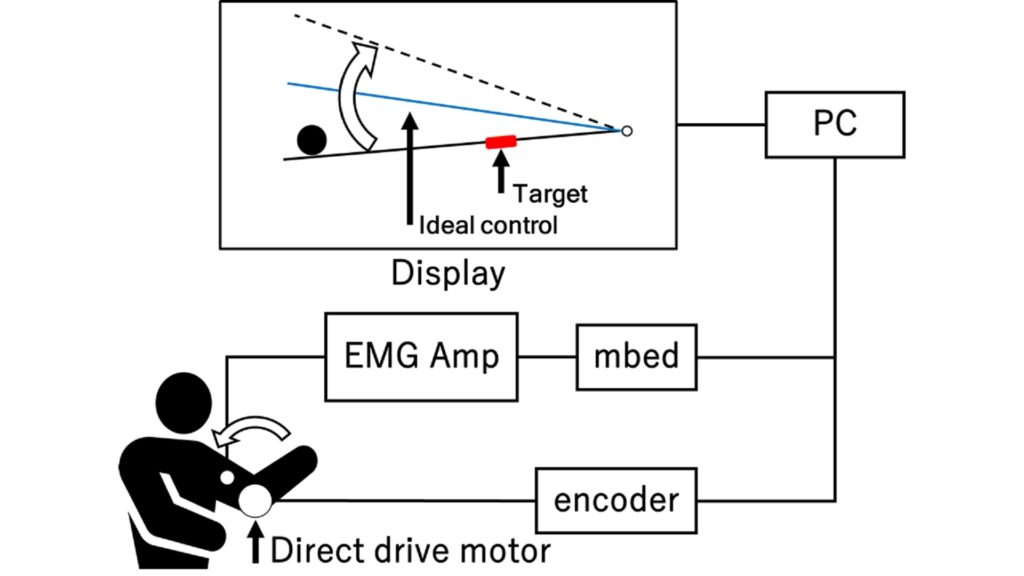
本研究では,自動化への信頼を「操作の依存」と定義して,図のような追従タスクを作成し,自動化への介入量を不信として評価する.
実験タスクでは,円周移動する目標を追従するもので,操作対象は左右方向のみ自動化されている.このとき左右への操作入力量を不信として信頼を推定する.
口調の曖昧な情報から話者の伝えたい情報の推定を行う対話システム
Yuzuki Baba
Keyword: Human-Machine, Voice-Tone, Human-Robot-Interface
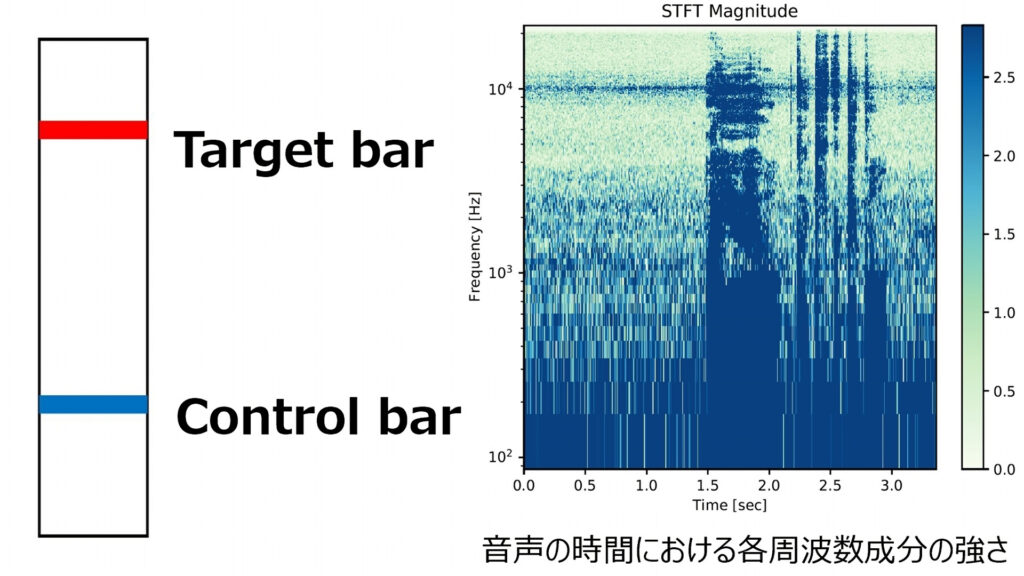
家電や電子機器を操作するインタフェースとして対話システムが注目されており,その技術として音声認識が用いられている.人間が発する音声には非言語の情報が含まれており,感情分析などが研究されている.しかし,実際の対話では情報伝達の観点からみると,感情以外の多くの情報が含まれていると考えられる.
本研究では口調から得られる曖昧な情報の中から,話者の意図した操作対象への移動量を推定することを目的としている.実験では,音声により操作対象を目標地点まで移動させる.その際の口調の特徴と移動距離との相関を取得することで,音声に含まれる曖昧さから意図した移動量の推定を行う.これにより,曖昧な表現を理解できる対話システムの可能性を検証する.
握力を利用したハンドルアシスト機構
Ryohei Hikino
Keyword: Human-Machine, Driver Sensing, Haptic Pressure

近年,高度なドライブアシスト機構が開発されている.中には視線などの生体信号を用いたアシスト機構が開発されている.しかし,操舵トルクを利用したものはあるがステアリングホイールを握る強さを用いたものは実現に至っていない.そこで,通常時と緊急回避時でハンドルを握る力が変化することに着目し,研究を行う.
本研究では,通常時と緊急回避時におけるハンドルの握力を測定し操舵アシストトルクを変動させる機構を提案する.また,入力された握力により運転者の走行イメージを予測し操舵に反映する機構を構築する.加えて,通常時と緊急回避時にどのようなトルクを提示すると緊張度が変化するのか考察する.
視線情報を用いた運転行動の推定
Kosuke Yoshida
Keyword: Human-Sensing, Driver Behavior, Eye Movement

近年,特に自動車産業においては完全自動運転実現に向けた開発が急速に進められており,その中で人間が運転に介入すべき場面は減少していくとみられる.しかし,その実現には多くの課題があるため人の運転行動を解明することは重要である.また運転に限らず,その他の場面においても人は「認知」「判断」「操作」を無意識に行っている.その上で視線情報は意図推定などにも用いられる.
本研究では視線情報から最終的に「判断」についての予測をすることを目的とする.そして実験ではドライビングシミュレータとアイトラッカーを用いて視線情報を非接触で取得する.また走行路形状の見誤りを判断ミスとして走行データを運転行動として視線情報との相関分析を行う.
体温変化を用いたリアルタイムな睡眠の質の向上法
Yugo Yoshida
Keyword: Human-Machine, Body Temperature, Sleep Quality
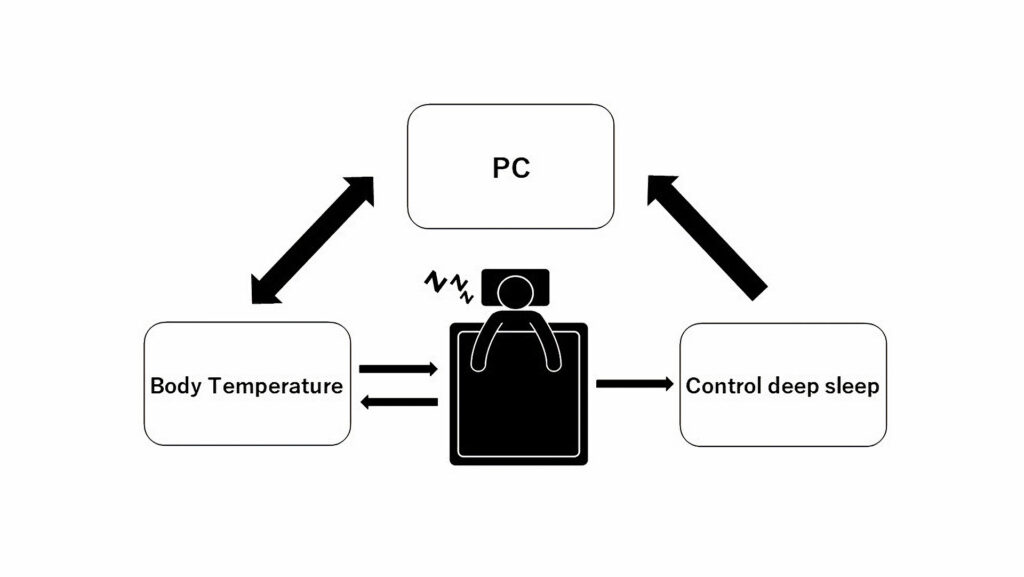
今日,睡眠不足は深刻な問題である.日本の成人5人に1人は睡眠不足を訴えている.従来の研究では身の回りの環境温度を変化させることで,睡眠の質を向上させる方法が提案されてきた.しかし,周りに自分以外の人がいる場合,自分の都合だけで環境温度を変化させることは困難であり,より簡易的な手法が求められる.
本研究では睡眠中の体温と睡眠深度との関係に着目し,睡眠中の足の末端に温度変化を提示する.これにより,リアルタイムに睡眠深度をコントロールすることで,睡眠の質の向上を目指す.また,睡眠深度だけでなく,アンケートによる睡眠感に対する評価を行うことで,より詳細な睡眠の質の評価を行う.
生体信号を用いた仮想空間上での動作再現
Xu Chang
Keyword: Human-Machine, Virtual Reality , EMG
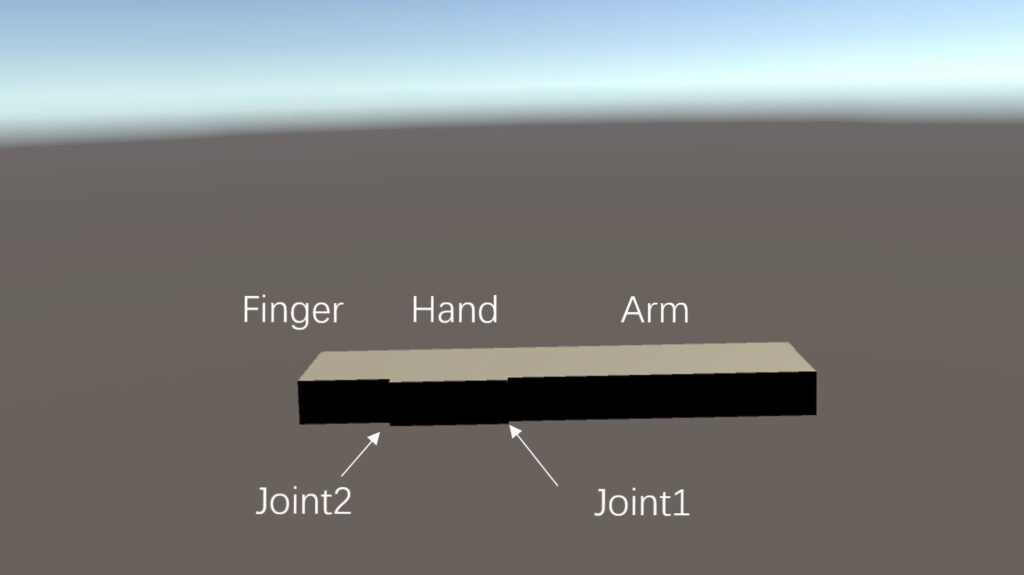
近年,VR (Virtual Reality) 技術は多くの分野で幅広く研究されている.しかし,四肢欠損者に対して操作が困難なことが指摘されている.例えば,足で操作するコントローラ等は開発されているが, VRの操作には対応していないため,手の機能を十分に発揮できるアシストシステムが必要となる.
本研究では手を動かした時の筋電信号と脳波信号を計測することにより,仮想空間上のモデルをリアルタイムで動作再現させることを目的とする.実験タスクでは,簡易腕モデルに2つの可動関節を設置し,計測した信号を角度信号に転換することで,手の平と指の動きとして再現する.
STAアーキテクチャによるCoaxial UAVの姿勢制御
Yutaka Inoue
Keyword: Motion-Control, Coaxial-UAV, Attitude Control
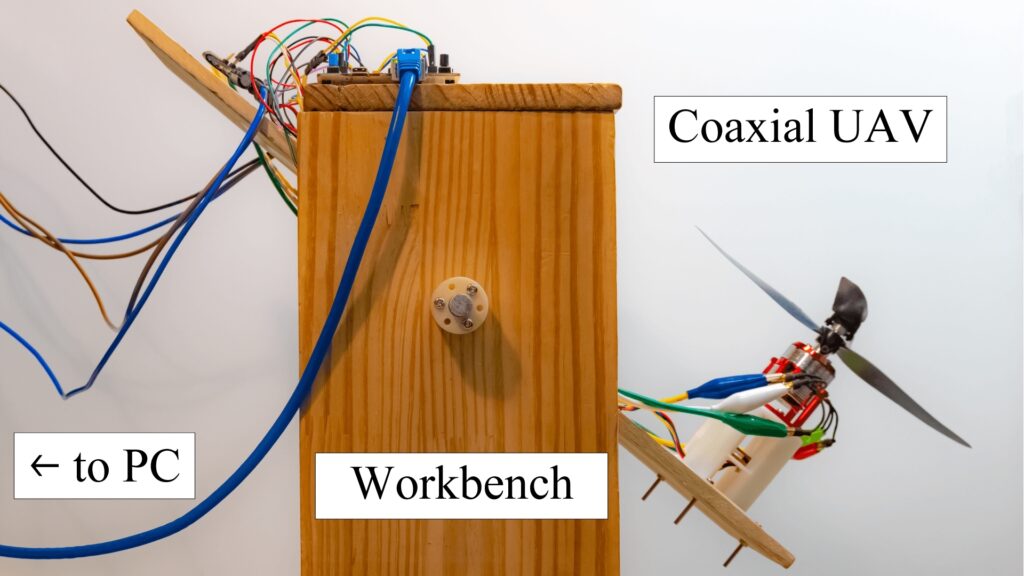
UAVは様々な場面で活用されており,荷物運搬に利用することで身体的負担を軽減することを可能とする.既存のUAVによる運搬では,運搬可能な重量の限界がある.
そこで,複数のCoaxial UAVを用いた運搬支援システムを提案する.STA(Sense The Atmosphere)アーキテクチャを用いてCoaxial UAVの姿勢制御を行う.STAアーキテクチャは複数機による協調制御を行う際に,環境の状態を考慮することを可能とする.これには,機械学習を用いて未来の姿勢角を予測する必要がある.
実験では機械学習アーキテクチャとしてLSTMを採用し,未来の姿勢角を予測しながらSTAアーキテクチャを適応する検証実験を行った.その結果,目標角に近づけるように姿勢制御を行えることが示唆された.
修士1年
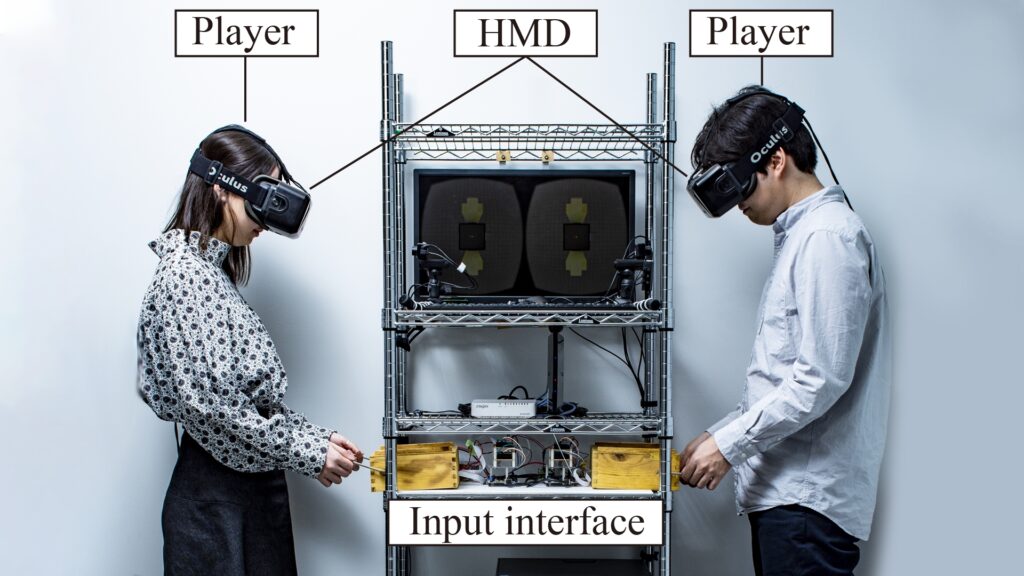
CFOによるチーム分けにおける協調作業特性の解析と分類
Kota Kobayashi
Keyword: Human-Human Assist, Teamwork-Analysis, Neural-Network
モデルどうしによる協調作業推定を行い,推定結果を用いたチーム分けを目指したが,期待した推定精度が得られなかった.協調作業すべての推定を行っていたため,協調作業効率を向上させるために必要な情報以外の推定も必要になり精度向上が望めなかったと考えられる.
そこで,本研究では協調作業の解析によるパターン分類を目指す.従来の協調作業プラットフォームに対してより単純化されたものを提案し,実験を行う.そして結果の解析を行い,解析結果に基づきNN等による分類機を構成する.解析結果に基づいた協調作業モデルどうしによる作業結果に用いることで協調作業効率を向上させるようなチーム分けが可能になると考えられる.
QCM 表面の疎水性および親水性制御による性状の異なる PM の分離測定
Masashi Saito
Keyword: Others
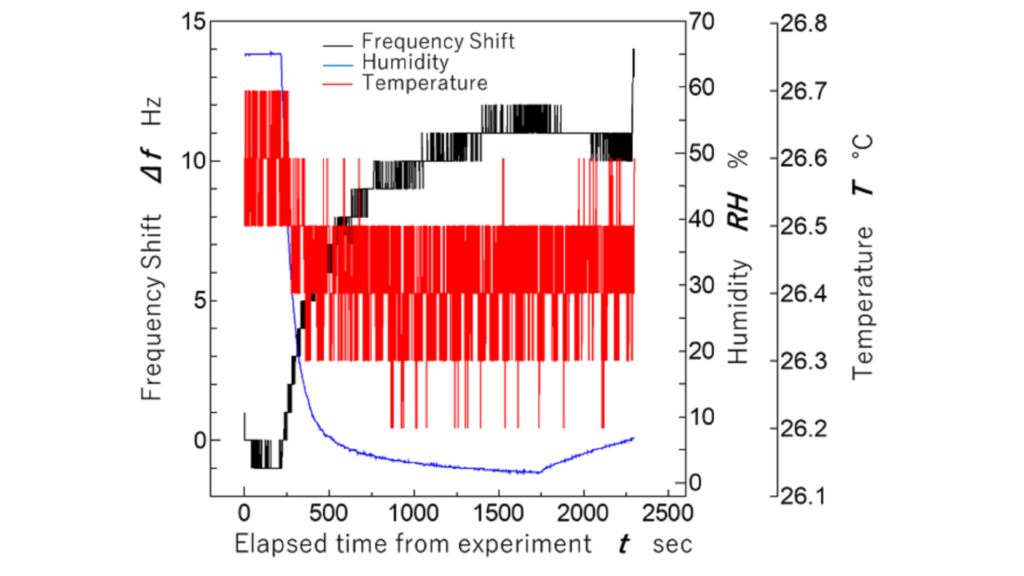
ディーゼルエンジンから排出される粒子状物質(PM)は,可溶性有機成分が表面に凝集した疎水性PMと水蒸気が表面に凝集した親水性PMに分別され,性状別に分離した測定手法の需要が高まっている.水晶振動子微量天秤(QCM)は,その表面に吸着した物質の質量を共振周波数の変化(Δf)として検出する.本研究では,QCM表面を親水性物質で修飾することで,親水性PMの捕集効率が向上し,PM測定に性状の選択性を与える.これまでに,QCM表面へのPM吸着を,Δfによって捉えられた.現在,燃焼由来の水分子による影響を検討している.図に相対湿度を65 %から0 %にした時のQCMの周波数応答を示す.このときΔfは約11 Hzである.したがって,PM吸着によるΔfが100 Hz以上となるように測定系の改良を行う必要がある.
カオス系を用いた個性模倣と多様性維持によるロボット動作戦略設計
Yohei Sugano
Keyword: Robot-Cooperation, Multiple Robots, Social Recognition
昨今,通信技術や半導体技術の発展に伴い,小型で高性能なロボットが開発可能になってきている.しかしリアルタイムで変化する環境での制御は難しく,動作設計をする上で課題となっている.本研究では,この課題をカオス系と呼ばれる性質と,社会性動物が持つ模倣と多様性という性質を利用してロボットの最適な動作設計することを目的としている.提案手法では各ロボットが持つ個性値と呼ばれるパラメータを,カオス系の関数であるファン・デル・ポール振動子を利用して個性値の多様性を実現する.また,各個体の性能を示すローカル評価値を用いて模倣を行なう事で,リアルタイムでの最適な動作設計の実現を目指す.現在は,カオス性を利用した各ロボットの動作設計及びそのロボットを実験するための環境構築を行なっている.
筋電図と神経筋電気刺激を用いた運動熟達支援
Tomoki Sumiya
Keyword: Human-Sensing, Electromyography, Motor Control
運動熟達とは脳からの指令と実際の動きを予測する内部モデルの獲得を意味し,熟達に伴って関節剛性や筋活動量が変化するという報告がある.本研究ではEMGを解析して運動熟達過程中の筋活動の変化を捉え,NMESによる運動熟達支援を目的としている.定量的な情報を基にNMESで直接人体を動かすことでアクチュエータの規模や自由度に依存しない熟達を目指す.実験では肘とバーの角度を共有したバランスタスクにおける内部モデル学習過程中のEMG変化を観測するため,理想的なバー角度表示の有無を比較する.今後の課題としては内部モデル学習と筋活動の変化について関連性を示した上で,支援手法の検討を進める.
描画動作のための力覚提示デバイスによる相補教示支援
Nao Takahashi
Keyword: Human-Machine, Haptic Interface, Bilateral Control
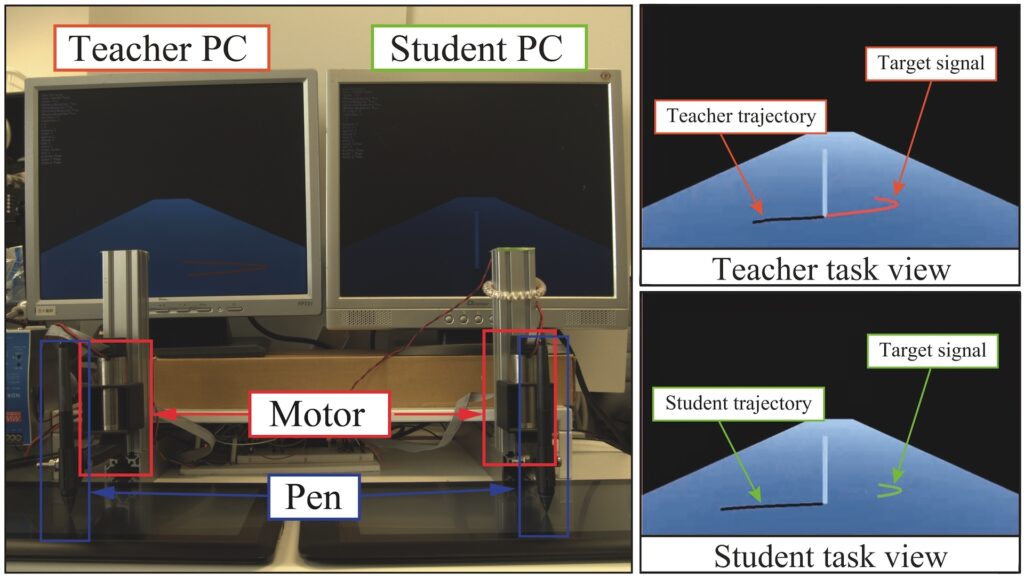
描画技能熟達のための力覚提示による支援として,熟練者と学習者で力覚を共有し相補に教示するシステムを提案する.
現在,技能伝承が社会的課題であり技能熟達に関する研究が行われている.多くの研究では,学習者をいかに熟達させるかに焦点を当てている.しかし,教える側に着目した研究はない.本研究では熟練者を教え上手になるようにアシストする相補教示支援の確立を目指す.
熟練者と学習者の力覚と描画動作の関係について明らかにするための実験を行った.熟練者と学習者の力覚ゲイン比を最適化することでパフォーマンスが向上する可能性が示唆された.
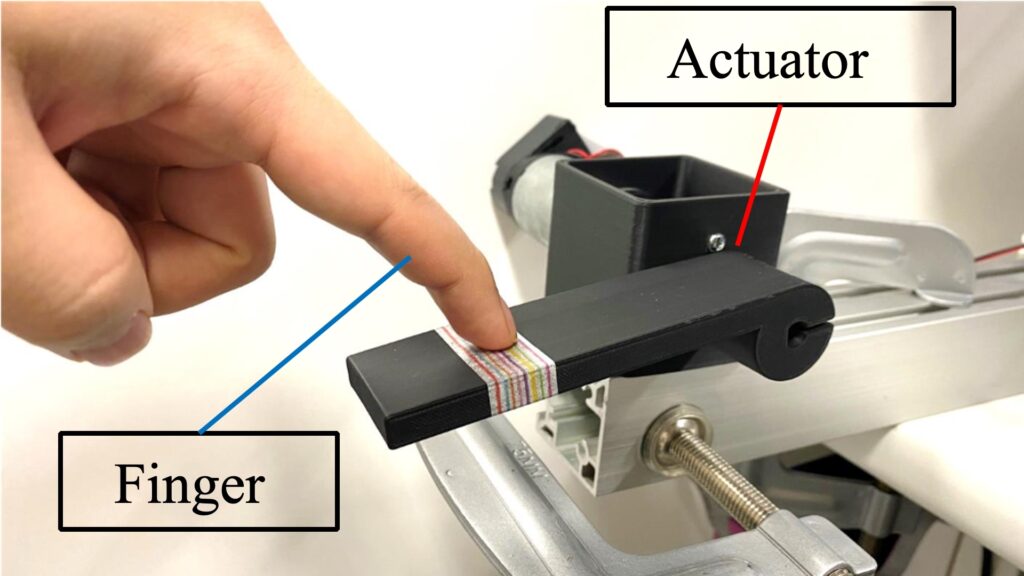
ハプティックインタフェースによるバーチャルペットの構築
Keisuke Tozuka
Keyword: Human-Machine, Haptic, Virtual
従来のペットロボットには,動物らしさの欠如によって,ロボットへの愛着が得られない問題があった. 動物らしさが欠如する原因は,複雑な骨格に出来ないことや電力の問題などである。そこで本研究では,仮想空間にロボットを作成し,触覚提示技術を用いて触れ合いを提供する.
触覚提示は,仮想空間にある物体に触れた感覚を,ユーザに提供することが可能である。本研究では,ケーブルをモータで牽引することで力覚を提供し,振動子によって質感を提供する.実験では,2次元空間において,物体の力覚の提示が可能になったという結果が得られた。また,物体表面に触れた際の振動を測定し,質感の振動特性を確認することができた。
早期楽器演奏熟達支援システム
Hikaru Nakanishi
Keyword: Human-Machine, Assist, Keyboard
鍵盤楽器演奏者の直感的な学習支援システムの構築を提案する.鍵盤楽器演奏において特に音色表現を的確に反映させることは困難である.そこで,ピアノ演奏者は聴覚と触覚などのマルチモーダルなフィードバックによって演奏していることに着目する.本研究では演奏者の鍵盤から受ける触覚フィードバックによって強弱操作パフォーマンスを向上させる方法について提案する.フィードバック手法として,初心者に対して機械操作の早期熟達支援に着目した高いパフォーマンスを発揮する物理的ダイナミクス制御を利用する.実験では,擬似鍵盤を用いて,提案する熟達支援を用いた操作パフォーマンス向上への有効性について比較検討を行った.
SnO2を用いたガスセンサの電気的特性の制御による高感度化
Naoya Nishina
Keyword: Others
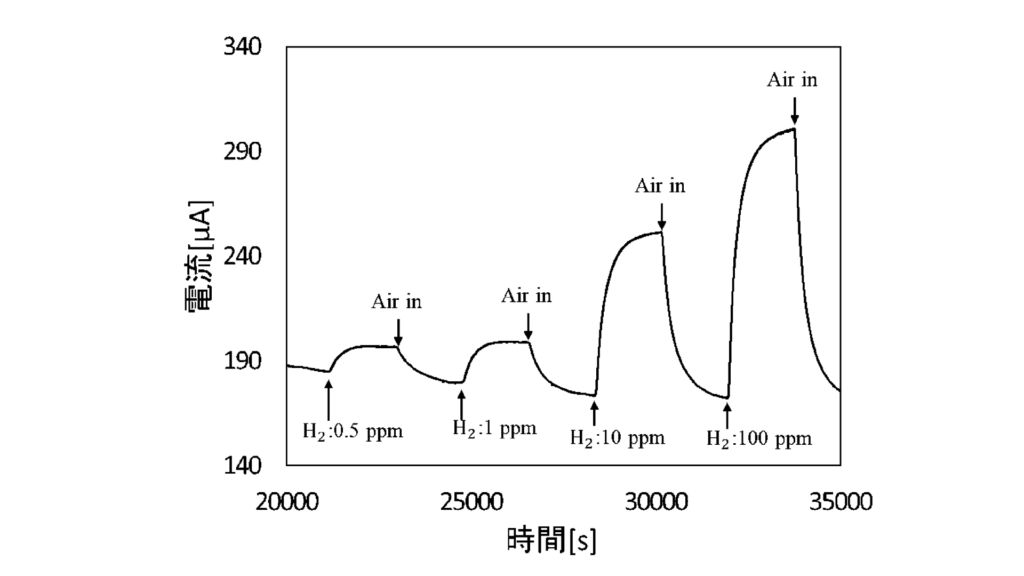
近年,人間の呼気中のppb濃度のガス成分が疾患との因果関係を持つことが解り,高感度ガスセンサの必要性が高まっている.半導体式ガスセンサは電気伝導性の変化からガスを検知し,低キャリア密度かつ高移動度であれば高感度になる.本研究では,サファイア基板に酸化錫(SnO2)を成長させて結晶の配向性に優れた高感度なガスセンサの作製を目的とした.現在,成膜温度400 °Cにおいて最も低い電子密度の膜が得られており,膜厚3 μmのセンサ層のガス感度は図に示すように0.5 ppmを達成した.膜厚が薄いほど,ガスの吸着に対するセンサ層のキャリア密度の変化は相対的に大きくなり,ガス感度は向上する.そのため,現在膜厚を0.1 μmまで減少させたセンサ層を作成し,膜厚と電気的特性の関係を検討し,ガス感度の評価を行う予定である.
修士2年・博士課程
個人差を考慮した協調作業の力覚アシスト手法の提案
Genki Sasaki
Keyword: Human-Human Assist, Teamwork, Force Feedback Assistance
本研究では協調作業中の集団作業効率を向上させるため,個人差を考慮した協調作業の力覚アシスト手法を提案する.
協調作業の集団作業効率を向上させることは,チームワーク支援や作業者の負担を軽減につながる.それを実現するため本手法では個人差を考慮した協調技能の定量評価を行っている.この評価手法を「気づかい」と呼び,「気づかい」による力覚フィードバックによって協調作業のアシストを行う.「気づかい」は集団作業効率に相関を持ち,「気づかい」を用いたアシストは集団作業効率の向上に寄与する.実験では協調作業中の作業者に対して力覚フィードバックを行い,集団作業効率を測定した.
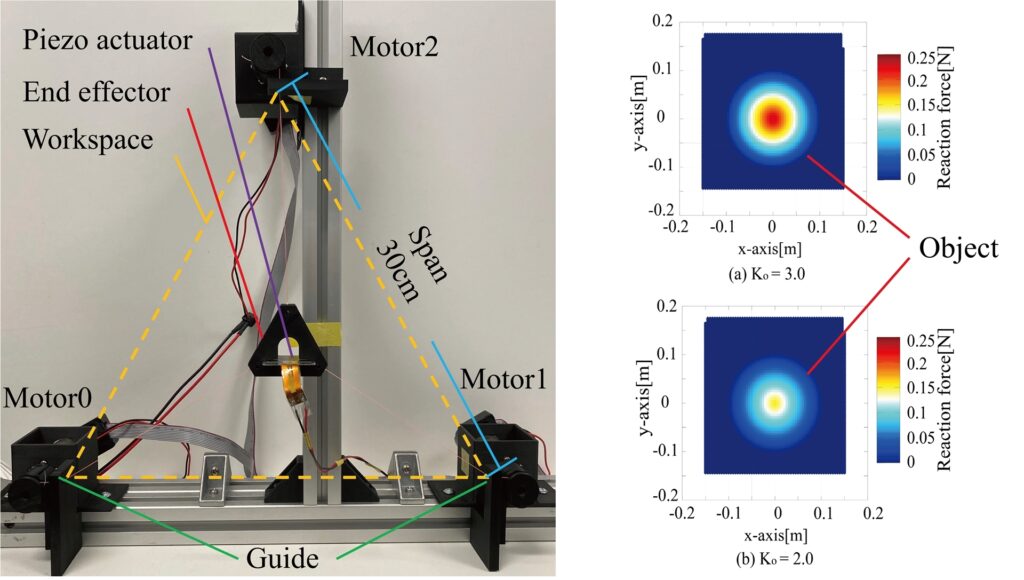
Grasping Interface for Virtual Reality using Wire-Driven Positioning System
Bastien Poitrimol
Keyword: Human-Machine, Cable Robot, Interface
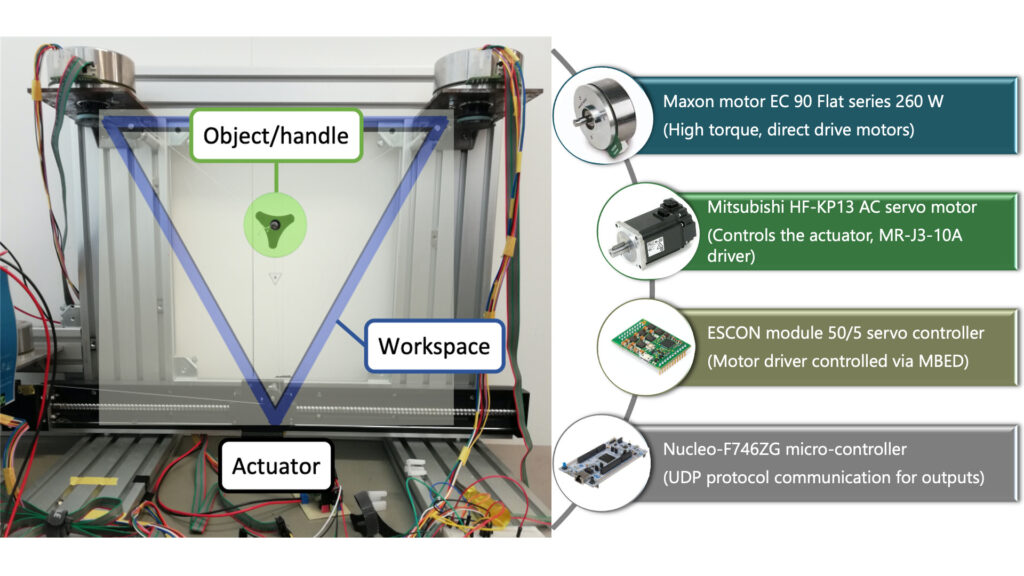
Cable haptic devices can display forces while keeping a low intrusiveness. However, serious cable interferences can appear when several end-effectors or a high number of cables are required.
A hybrid n+1 planar cable haptic device architecture based on SPIDAR which includes a linear module is introduced in this research. The proposed system’s workspace consists triangle with three DC motors. One vertex of this triangle is moved by one AC servo motor to prevent cable interference. Future work could show that the configuration of the device can be adapted to several end effectors at the same time for grasping tasks.
両手同時操作における自己回帰型操作支援
Sena Koizumi
Keyword: Human-Machine, Motor Behavior, Skill Learning Support
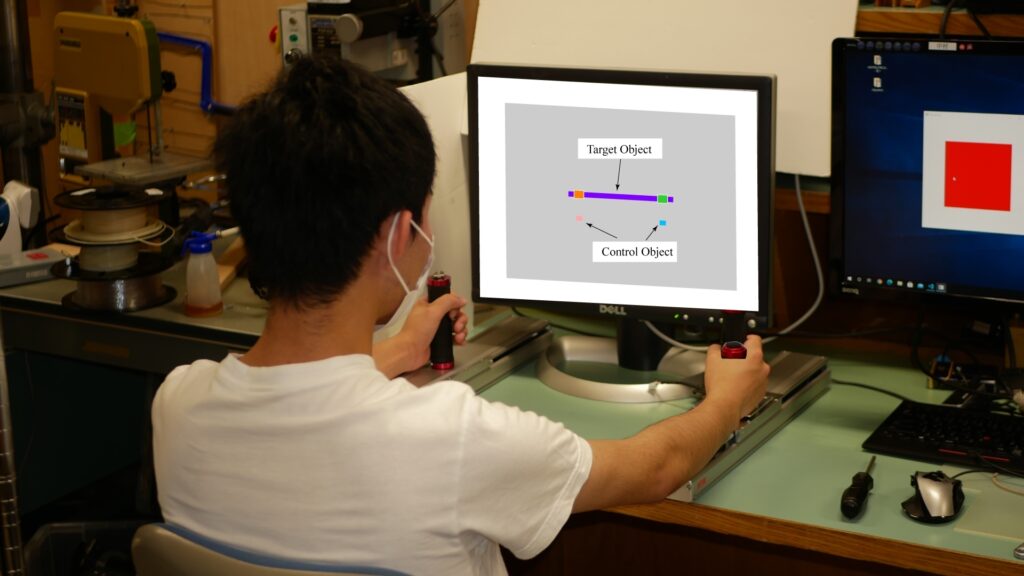
昨今,自動化と人間による操作を伴う機械の両立化が進んでいる.その中でも,複数人で作業を行うものを単独で行うことができる機器の開発が望まれている.そして作業を単独で行うためには,高い自由度が必要となる.そこで私達は両手による機器操作学習の支援に着目した.
本研究では,両手協応を包括した操作学習支援の実現を目指している.提案手法では作業を行う際に,片手操作時の操作デバイスの重さを適正化した場合と両手操作時の操作デバイスの重さを適正化した場合を比較,検証することによって,両手同時操作における適正なデバイスの重さを再現することを行う.実験では,操作デバイスの重さを再現するためにモータを用いて,目標追従タスクを行っている.
重畳情報分離のための回転複合センサによる多層化マッピング
Taichi Kosaka
Keyword: Robot-Cooperation, Fusion-Sensor, Mapping
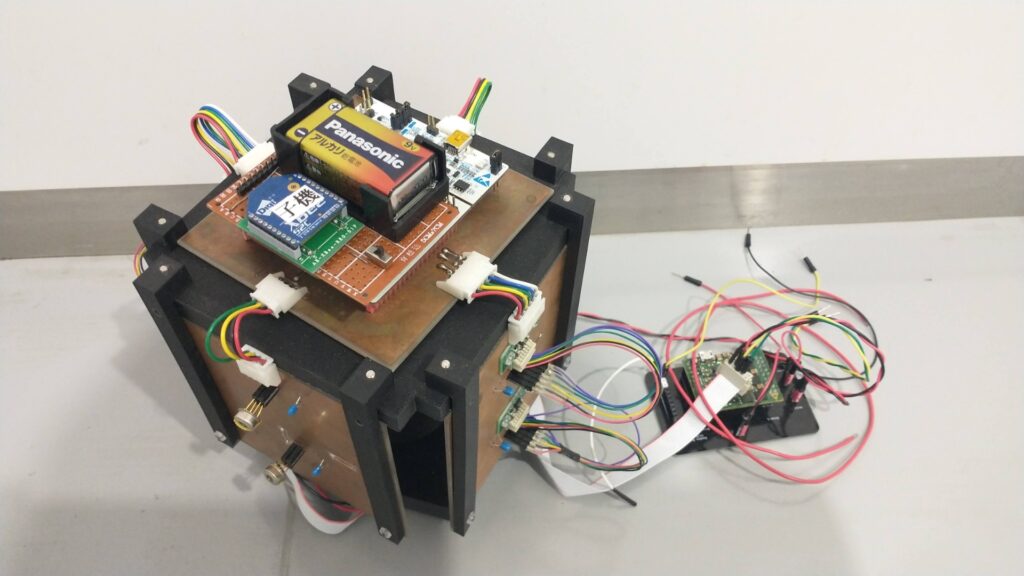
人間と同様にロボットが情報(距離,温度,音など)の発生源を特定するには,奥行きを包含した観測が必要である.センサ全般に温度であれば温度センサをといった具合に用途別のセンサは存在するが,設置角度による制限と奥行きのない平面での測定しかできないといった問題がある.
本研究では,情報を一括して扱い,センサをモータによって回転させながら周囲環境情報を取得することによって,それぞれのセンサの特性を活かし,奥行きを持った情報マッピングを目的とする.今後は制作したデバイスでマッピング,センサ種類増加による情報の可視化,複数の視点による重畳情報の分離を検討する.
ストレス応答と操作パフォーマンスの相関性検討
Kanaya Nakamura
Keyword: Human-Sensing, Measuring Psychological Stress, ECG
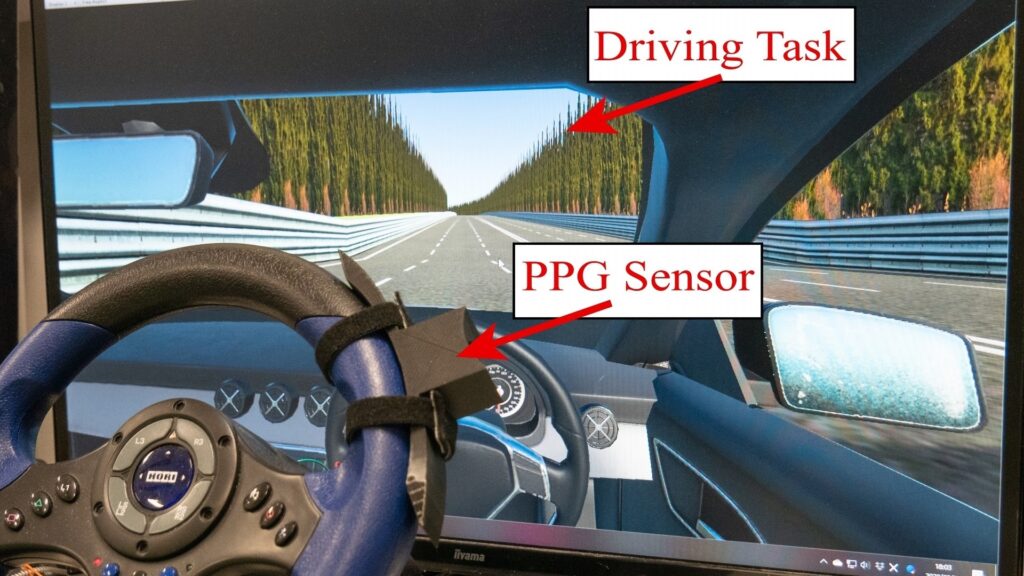
近年,ストレス社会と言われているように,ストレスが交通事故の発生率の増加といった,作業パフォーマンスに悪影響を及ぼしていることが社会問題となっている.そのため,ストレスを高速で検知し,かつ緩和させるシステムが注目されている.
本研究では,脈波や皮膚電位反応といった人間のバイタルデータを用いてストレスを検出・予測をし,将来的にはストレス低減アシストへ応用する.検証実験環境として,ドライビングシミュレータを開発し,ストレスによる運転パフォーマンスの変動の計測を行った.今後,ストレス・パフォーマンスの観点から操作アシストアルゴリズムを実装していく.
サブリミナルキャリブレーションによる内部モデル修正支援
Yusuke Yamazaki
Keyword: Human-Machine, Motor learning, Force Feedback Assistance
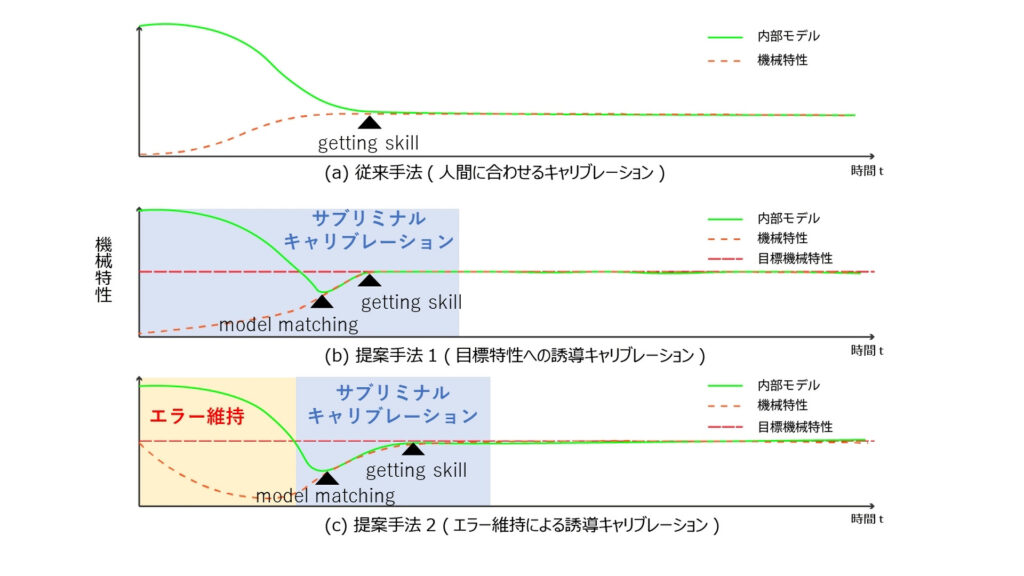
人間は機械操作を行う際,自身の入力に対するシステムの応答を予測しながら操作を決定する.運動学習のプロセスではこの予測モデル(内部モデル)を実際の動作と比較し,修正することで操作の精度を向上させる.
本研究ではこの運動学習プロセスに着目し,内部モデル修正を支援することによる運動学習の早期化を目的とする.提案手法では人間に気づかれない機械の応答モデル制御によって内部モデルの修正を妨げない熟達支援の手法として考案されているサブリミナルキャリブレーションに着目し,内部モデルの誘導による熟達の早期化を目指す.
検証実験では円運動追従タスクを用い,一定時間内における操作パフォーマンスの向上が確認された.