-
 研究テーマ
研究テーマ
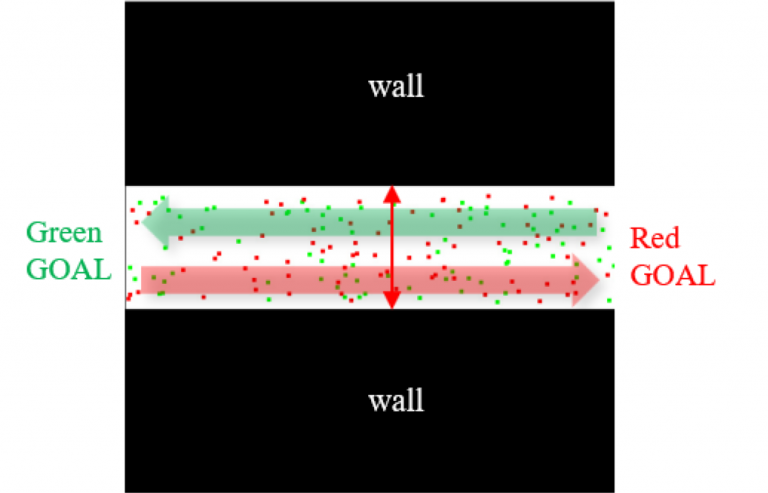
個性模倣によるリアルタイム環境適応アルゴリズム
今日,複数ロボットを用いた協調作業では,事前に環境適応させた動作戦略設計がされています.しかし,こうしたロボットでは予期せぬ外乱に対して機能することが出来ない問題点がありました.そこで本研究では,人間の社会性認知にみられ […]-
 crlweb
crlweb
-
-
研究テーマ
インタラクションを考慮した人間モデルによるモデルベースチームワークセンシング
本研究室では一人作業とチーム作業の差を「気づかい」と定義し,チームワークを評価する研究を行っています.チームワークを「数値化」できる,今までにない新しい研究です.しかし,現状では組み合わせごとに実験が必要になる事からチー […]-
crlweb
-
-
 研究テーマ
研究テーマ
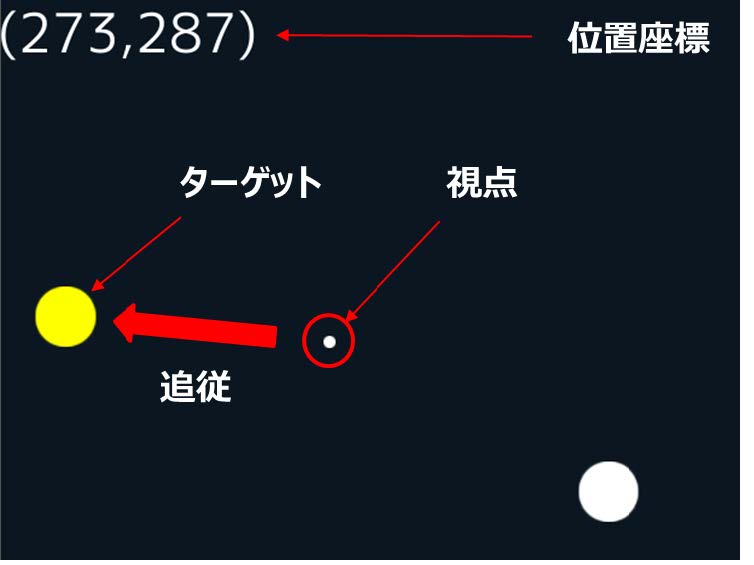
視覚負荷における視線動作を用いたストレス推定
近年,様々な場面でスマートフォンやタブレット端末を目にする.それらのデバイスは人々の情報メディアとして確立している.情報の発信,共有,拡散と誰でも容易に情報を扱うことができるようになった反面,必要な情報を選択して得る必要 […]-
crlweb
-
-
 研究テーマ
研究テーマ
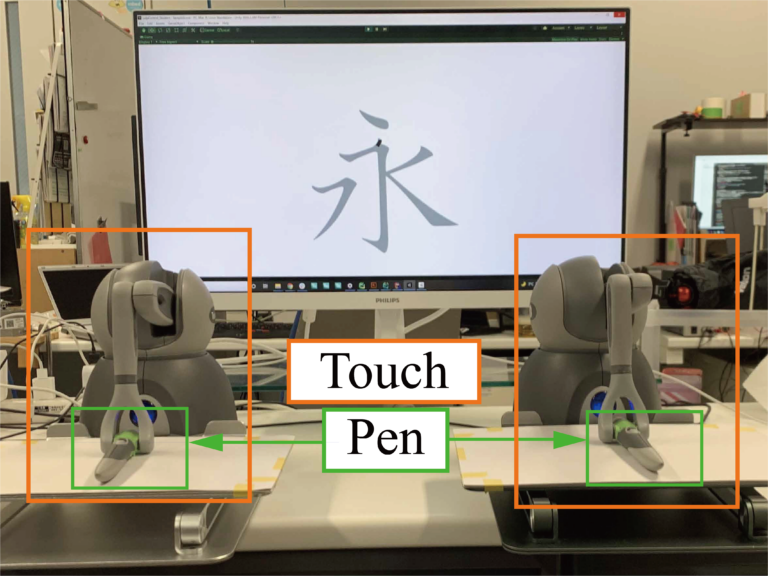
描画動作のための力覚提示デバイスによる相補教示支援
絵や文字を上手に書けるようになりたい、と誰しも一度は思ったことがあると思います。本研究では絵や文字を上手に描くための支援として人間の力覚にアプローチします。書道を例にするとはね、とめ、はらい等の筆づかいは筆圧や書く速さが […]-
crlweb
-
-
 研究テーマ
研究テーマ
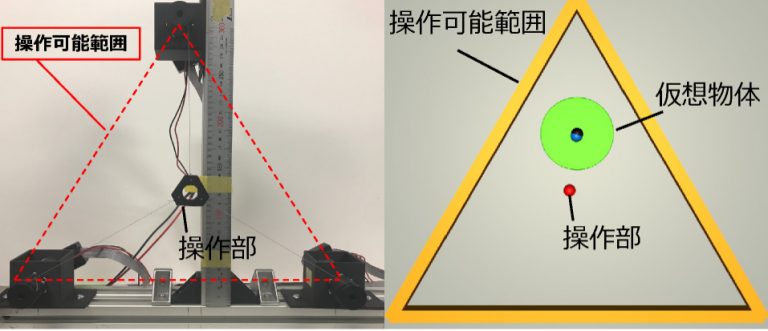
ハプティックインタフェースによるバーチャルペットロボットの構築
実空間における動物型ロボットは関節や表情を増やすと、重量や大きさが増えてしまいます。その結果、動物らしさを表現することが出来ず、すぐに飽きられてしまいます。そこで本研究では,バーチャル上でペットロボットを構築することをに […]-
crlweb
-
-
 研究テーマ
研究テーマ
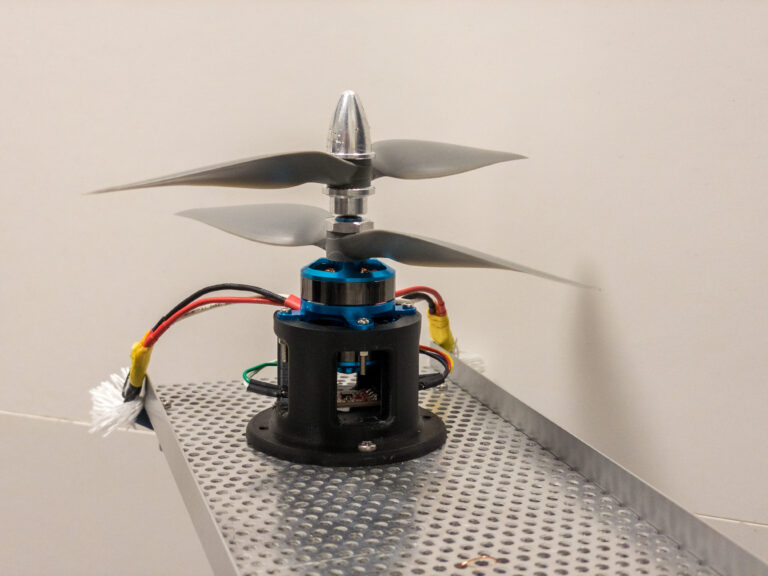
二重反転プロペラを用いた天井吸着ドローン
近年、ドローン市場の成長は著しく、災害現場での状況確認や橋脚など高所の構造物点検に用いられており、その活躍現場は多岐にわたっています。ドローンを活用するうえでの最大の利点は高所作業等、人が立ち入る際にリスクが伴う現場での […]-
crlweb
-
-
研究テーマ
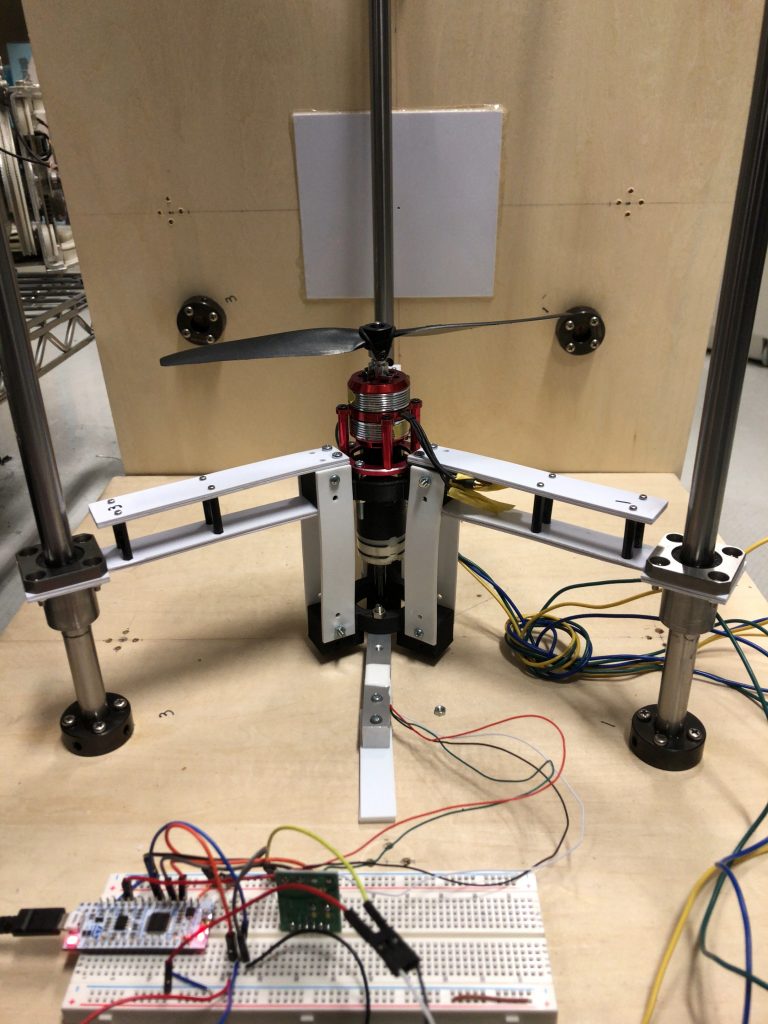
複数のCoaxial-UAVによる協調搬送に向けた姿勢制御
UAVは様々な場面で活用されており,荷物搬送に利用することで既存の搬送手段の代替とすることが期待されています.これまでのUAVによる搬送では,搬送可能な重量に制限があります.そのため,複数機を用いた搬送について研究が行わ […]-
crlweb
-
-
 研究テーマ
研究テーマ
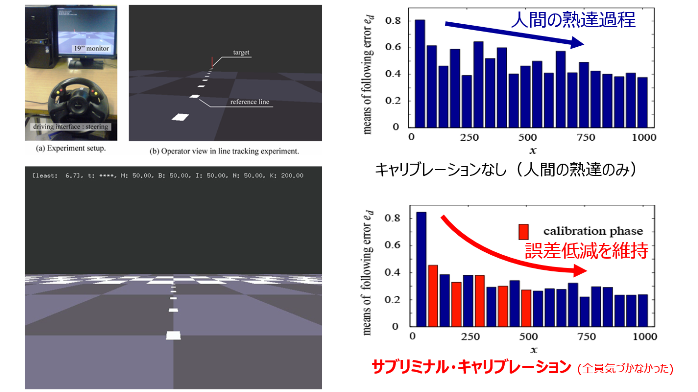
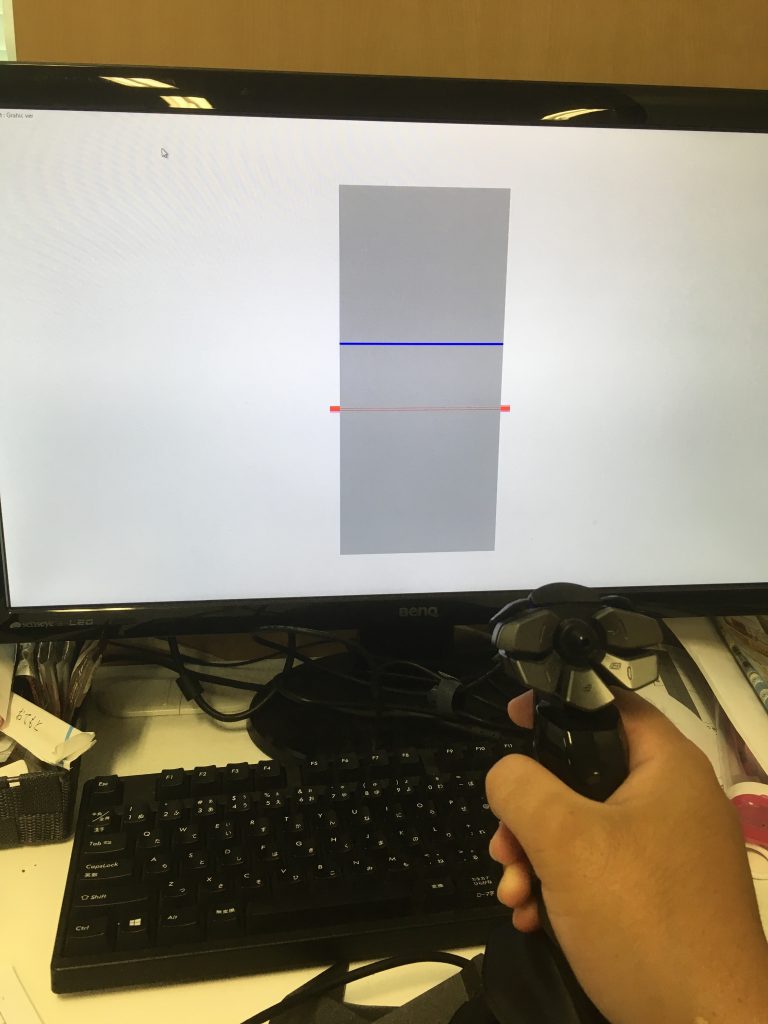
サブリミナルキャリブレーションによる機械操作熟達支援
サブリミナルキャリブレーションによる機械操作熟達支援 ヒトが介在する機械操作において,初心者のミスを低減し,高いパフォーマンスを発揮できるようアシストするための研究が数多く行われています. しかし,時としてアシストが大き […]-
crlweb
-
-
研究テーマ
ニューラルネットワーク学習結果の合成による人間モデル生成
近年,ニューラルネットワークを用いた研究が盛んに行われている.ニューラルネットワークは学習の過程でたくさんのデータを用意する必要がある.人の動きを学習する際には入力デバイスのコストの問題も今後考慮される.そこで本研究はニ […]-
crlweb
-
-
 研究テーマ
研究テーマ
Group Trajectory Optimization using Swarm Intelligence
Group Trajectory Optimization using Swarm Intelligence Nowadays, Industrials are relying more than ever on ful […]-
crlweb
-