東京電機大学 工学部 電子システム工学科 協調ロボティクス研究室のホームページへようこそ
本研究室は,新しい人工知能研究領域である 「協調」 に関する幅広い研究を行っています. ヒトの気持ちを察し,ジブンの動きが相手に与える影響を予測することができれば, きっと 空気を読めるロボットが実現できると考えています. これを究極の目標として,様々な基礎研究を行っています.
空気を読める!? 賢さ
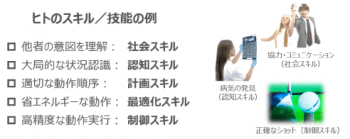
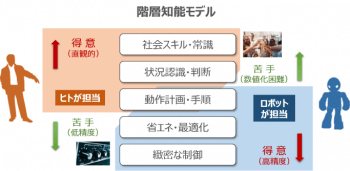
近年,科学技術の発展により,賢く役に立つロボットの期待が高まっています.しかし,人工知能に代表される賢さに関する研究も,まだまだヒト(設計者)の想定を越えることは難しいと考えます.そこで,柔軟なヒトの知能に学び,その知能を活かすアプローチが盛んに研究されています.しかし,賢さを構成する要素は様々であり,何ができれば賢いか?という問題は研究者ごとに異なっているのが現状です.ここで,ヒトの技能(スキル)を整理して図1のようにを階層的に並べてみます.実はこの階層の順番が重要なポイントで,上に位置するほどヒトにとって直観的,逆に下に行くほど人が苦手で負担が大きいスキルと考えることができます.同様の階層でロボットの人工知能を並べると,面白いことにちょうど,得意不得意が上下反転します(図2).つまり,ヒトが苦手なことが実はロボットが得意で,ロボットが苦手なことがヒトにとって得意であるといえます.
このように考えると,ヒトとロボットがどのように協力すればよいかが見えてきます.つまり,ヒトとロボットが,それぞれ得意な部分を役割分担すれば,ヒトとロボットのペアは高いパフォーマンスを発揮できそうです.これが人間機械系とよばれるヒトと機械(ロボット)の協調を研究する一つの意義であると私たちは考えます.
しかし,ここで2つの問題が生じます.1つは,ロボットが行う動作(サポート)がヒトにとって大きなお世話になってしまうことが,しばしば起こることです.ロボット(正確にはロボット設計者)が良かれと思ってアシストをヒトに与えても,結果的に邪魔をしてしまう可能性は捨てきれません.そして2つ目は,ヒトの熟達の問題です.特に初心者はミスを起こす可能性が高いと考えられます.さらに,時間とともに熟達が進むに連れて,操作特性が変化します.ロボットにとってサポート対象の行動パターンが変化してしまうことは,非常に問題を難しくしてしまっていると言わざるを得ません.
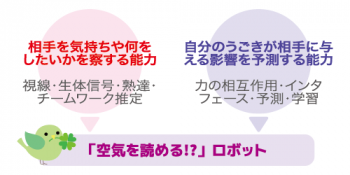
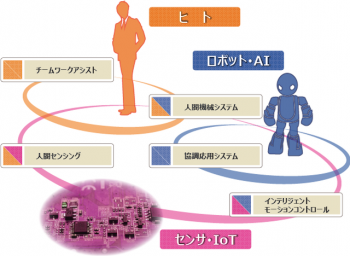
本研究室では,このような問題の解決の糸口として,「協調」が挙げられると考えます.つまり,ヒトがどのような意図をもっているか?どのような特性で操作しているかを察して,さらに自分の行動が他者に及ぼす影響を予想しながらアシストを実行する能力です.実は,協調はロボットからヒトへのほかにも,図4のようにロボット同士の協調作業やヒト同士のチームワーク支援などにも応用が可能な概念です.この協調できる能力をいかにしてロボットに理解させ,役立たせるかが本研究室のチャレンジです.