近年,安全性を向上させるだけではなく,運転の容易さ,快適性を高めるための各種運転支援システムの導入が進んでいます.しかし,自動車を運転するドライバーはスキル,嗜好,癖など様々な特性を持っているため,個々の操作特性に合った運転支援や制御をすることが重要になります.また,支援や制御のタイミングなどがそのドライバーの操作特性に合っていないと煩わしい,あるいはお節介と感じさせる場合があります.これは,一般に制御や支援タイミングやその量などを一律に平均的なドライバーに合わせて設定していることによります.したがって,ドライバーごとに適合可能な新たな設計手法を構築することが必要となっています.
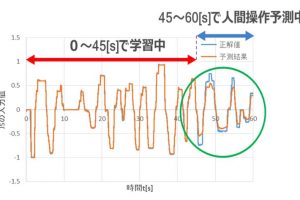
現在,広い分野において,車の運転熟達支援に関する研究がされています.本研究では,初心者や高齢者が短時間で思い通りに操作できるシステムの実現を目的とします.人間の脳の仕組みを模したメカニズムであるニューラルネットワークを用い,ダイナミクスを最適化することにより,ドライバーの操作誤差を削減することを目指します.