自律エージェントの集団協調行動をマルチエージェントシステム(MAS)といい、ロボティクス、情報工学、数学、化学など様々な分野において注目されています。中でもロボティクスの分野において、災害現場や深海、深宇宙など人間の介入が困難とされる環境下における活躍が期待されています。
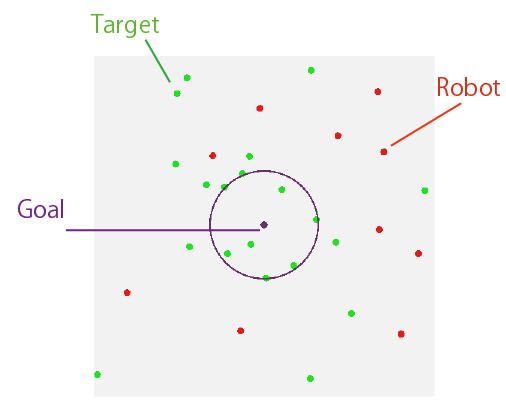
近年、森林火災や海洋プラスチック、宇宙デブリなどの環境問題が深刻化しており、このような環境下でロボットを用いる取り組みが世界的に進められています。MASをドローン技術に応用し、炎や水中の物体を誘導する研究はありますが、現状誘導するターゲットのモデル化が必要であり、それらの未知ターゲットのモデル化は困難とされています。そこで本研究ではMASを応用し、ターゲットの動作性質に適応し誘導するアルゴリズムの研究を行っています。この際、ロボット同士で互いの誘導動作を評価し、評価値の高いロボットの動作を模倣するアルゴリズムを使用しています。これによりロボット群全体でターゲットの動作に適応できると考えています。現在は、模倣以外のフェーズで自ら誘導動作を更新可能な、自己学習モデルを構築中です。これにより、学習の効率化と模倣による動作の収束を同時に解決できると考えています。