実空間における動物型ロボットは関節や表情を増やすと、重量や大きさが増えてしまいます。その結果、動物らしさを表現することが出来ず、すぐに飽きられてしまいます。そこで本研究では,バーチャル上でペットロボットを構築することをに着目しました。プログラムで構築するため,自由に設計が可能です。バーチャル上にいるペットと触れ合う手法としてハプティック技術を用います。この技術は人体に力(力覚)や振動(触覚)を与えることで,物に触れた感覚を再現することが可能です。
力覚は,ケーブルの牽引によって2自由度で再現可能な構造を構築しました。3次元の物体を作成するには,もうひとつケーブルを追加することで可能になります。操作範囲はモータ間の距離に依存します。作成したデバイスはこの距離を30cm~60cmまで変えられます。また,仮想オブジェクトの重さや性質はパラメータで変えられます。弾性を上げるとボールのように,粘性を上げるとスライムのようになります。ただし,力覚だけではテクスチャが分からないので,物体を認識することが困難です。
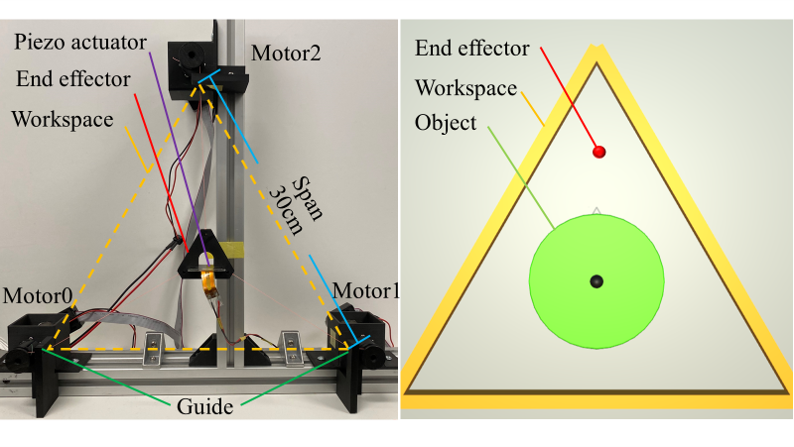
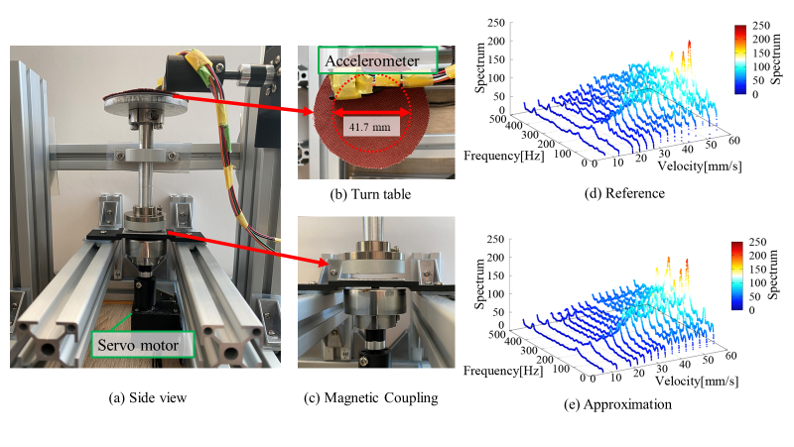
そこで,ユーザーが操作する部品(End effector)には振動子を取り付けており,これによって触覚を再現します。人間がテクスチャ表面を触れるとき,その速度によって知覚するテクスチャが変化しますが,これは振動の変化が原因です。本研究では,この振動の変化をホワイトノイズとパラメトリックイコライザ(PEQ)で再現しています。測定装置はターンテーブルのようになっており,テクスチャを乗せます。そして,ターンテーブル上で回転するテクスチャをツールでなぞって測定をします。システムとしてはレコードに似ています。振動は加速度計で測定し,そのデータの周波数特性を確認します。この周波数特性と一致するようにPEQのパラメータを調整します。