近年、人間社会においてロボットの普及が顕著であり、その中でもヒューマノイド型のロボットが多く登場しています。これまでのロボットは主に生産現場などにおいて作業の効率化を図るために使用されていましたが、最近はAIを搭載したコミュニケーションロボットなど、人間に対するものが増えています。今後このようなロボットが人間社会に円滑に溶け込んでいくためには、人間の意図や行動をロボット側が汲み取り、人間側にストレスを与えることなく行う行動、協調動作が必要となります。
本研究では、ロボットの協調動作のために人間の視覚的注意を使用します。ロボットの動作によって人間の視覚的注意を操ることができれば、視覚的注意が集中していない部分で動作を行うことで、人間に違和感を与えず、ストレスのない動作が可能になると考えています。また、視線の誘導方法について、視線計測を行いながら効率よく注意を誘導できる方法についても合わせて検討を行っていきたいと考えています。本研究のフューチャービジョンとして、人間の注意を利用できることから手品を行うマジシャンロボットが実現できるのではないかと考えています。
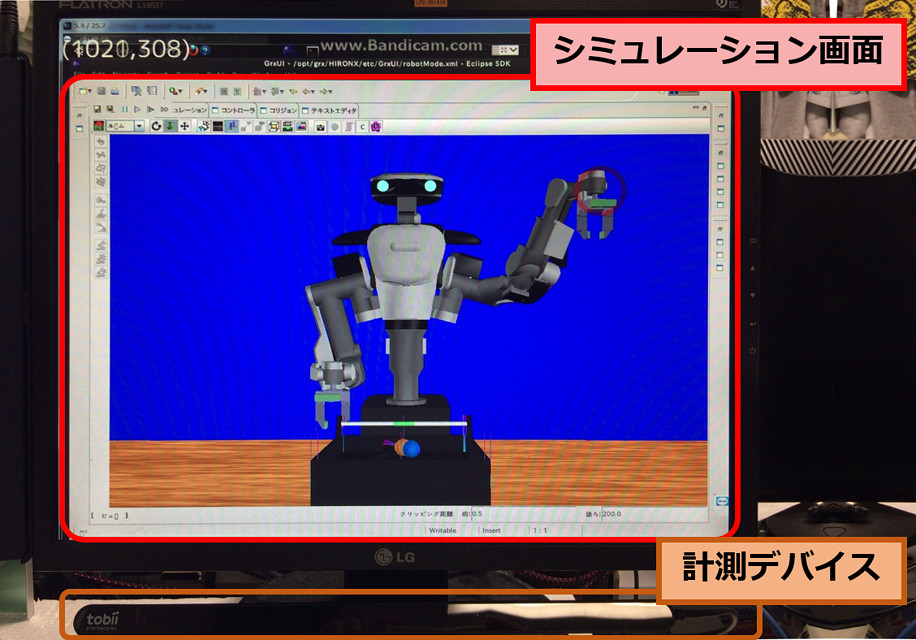
現在はロボットの動作シミュレーション画面をディスプレイ上に表示させ、同時に視線計測デバイスにより被験者の視線を測定することによって視線の変化を記録するという実験を行っています。今後は視線の誘導動作の検討、加えて実際のロボットを動作させて実験を行うために、実験装置、環境の構築などを行っていく予定です。
ロボットの動作に対する視覚的注意の変化の測定
-
著者
 crlweb
crlweb