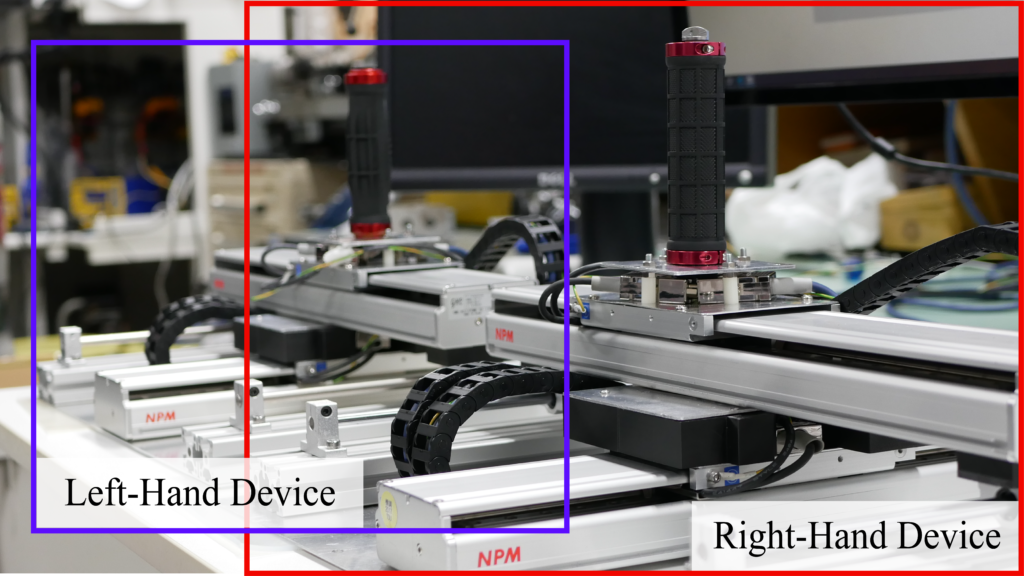
多様な道具を有した機械操作を実現させるためには、多くの自由度を持つ操作が必要となります。そこで、両手を用いた自由度の高い操作が注目されています。両手操作の課題の一つに、クロストークが挙げられます。クロストークとは、片手への外乱が他方の手へ影響を及ぼすことを指します。そこで、本研究はクロストークを考慮した機械操作支援を目指します。本実験では両手動作時の意図的外乱なしとありの場合の操作軌跡差をクロストークと仮定します。操作モデルを意図的外乱のない操作基に作成することによって、入力デバイスの機械特性の調整を行います。
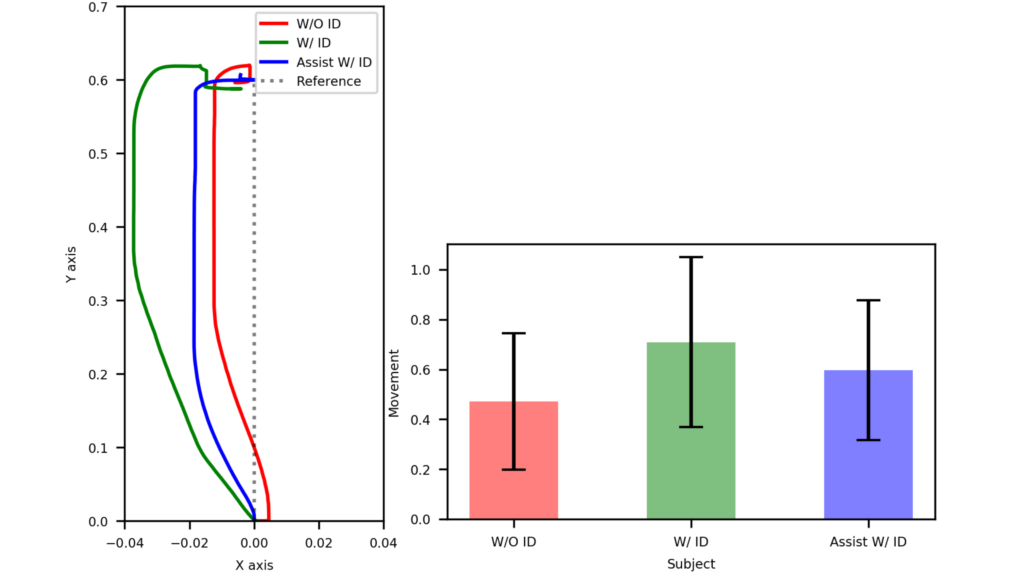
実験結果は、操作軌跡と移動量が提案手法によって意図的外乱による影響の低減が確認された。
この研究によって、人間拡張デバイスの汎用化や従来の両手操作デバイスでの操作支援を実現できると考えています。また、人間個人内での動作は対人間において応用することができるため、人間同士の動作や関係への支援へと繋げられると考えています。